Pattern Matching
Pattern matching is arguably one of the most important image analysis tools and is very often the first step in a Machine Vision application. In general, pattern matching provides you with information about the position and the number of instances of a previously defined template (pattern).
Introduction
We can try a first pattern matching example in IMAQ Vision Builder. The procedure is similar to the previous shape matching example, with the main difference that the image has to be a gray-scaled one:
- Define a template (ROI or file).
- Search for instances of the template (see also Figure 5.54).
Figure 5.54. Pattern Matching with IMAQ Vision Builder
Figure 5.54 also shows the parameters of the pattern matching process:
- the maximum number of instances that can be found;
- the minimum matching score (see also the shape matching example);
- the selection between shift invariant and rotation invariant mode:
- Shift invariant mode does not allow rotation of potential matches in relation to the template; this means that only matches with the same orientation as the template are found.
- Rotation invariant allows matches in any direction; this mode is significantly slower than the shift invariant mode.
Figure 5.55 shows the result with the same image if the minimum matching score is decreased to 600; now the partly hidden 10 and the first two digits of the 100 note are found, although the 100 is a different color .
Figure 5.55. Pattern Matching: Decreasing Matching Score
Pattern Matching Techniques
The mathematical basis of pattern matching is the cross correlation function. The correlation C(i,j) is defined as
Equation 5.26

where w ( x,y ) is a subimage (template) of the size k x l ; f ( x,y ) is the original image of the size m x n (where k  m and l n ); i = 0, 1, ... m -1, j = 0, 1, ... n -1 [4].
m and l n ); i = 0, 1, ... m -1, j = 0, 1, ... n -1 [4].
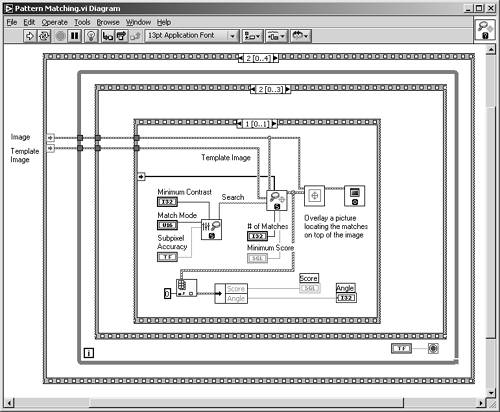
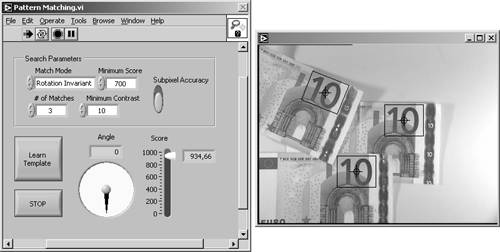
Figure 5.56 shows the front panel of a LabVIEW VI provided on the attached CD-ROM. The program is similar to the IMAQ Vision Builder functionality and allows definition of a template and the matching process itself. Moreover, the orientation of the (first) match is displayed with a gauge control. See also Figure 5.57 for the diagram, showing the main loop of the pattern matching process.
Figure 5.56. Pattern Matching: Single Match
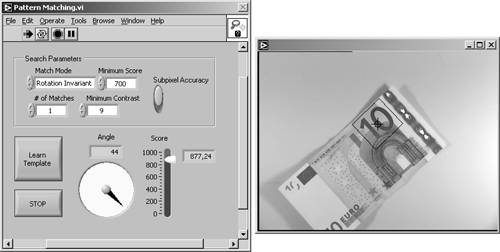
Figure 5.57. Part of the Pattern Matching Diagram
The same application finding multiple instances of the template can be seen in Figure 5.58. The Number ( # ) of Matches control has to be increased to the desired maximum number of instances. Note that the matches found in this example as well as in the Vision Builder are not scale invariant, which means that all instances have to be the same size as the template.
Figure 5.58. Pattern Matching: Multiple Match
Another problem with Eq. (5.26) is its high sensitivity to amplitude changes of the template as well as of the image, which has to be searched for matches. Amplitude changes are caused by different lighting conditions of new images or by brightness changes of the original image.
A normalized correlation coefficient R ( i,j ), as in
Equation 5.27
solves this problem:  is the average intensity value of the pixels in the template w , and
is the average intensity value of the pixels in the template w , and  is the average intensity value of the coincident image area f , which leads to a range for the value of R from “1 to 1. R is therefore independent of intensity changes of f and w [4].
is the average intensity value of the coincident image area f , which leads to a range for the value of R from “1 to 1. R is therefore independent of intensity changes of f and w [4].
The result of the function IMAQ Match Pattern is a data set for all matches found in the original image. In particular, the center coordinates and the rotation angle (in the case of rotation invariant matching) can be used for further image analysis, for example, for the definition of a new coordinate system.
IMAQ Vision also contains functions for color pattern matching, for example, IMAQ Color Match Pattern . These functions combine the gray-level pattern matching functions with the matching of color information. The results of both algorithms are used to calculate the total matching score. You can try these functions, using IMAQ Vision Builder.
Reading Instrument Displays |
Introduction and Definitions
- Introduction
- Some Definitions
- Introduction to IMAQ Vision Builder
- NI Vision Builder for Automated Inspection
Image Acquisition
- Image Acquisition
- Charge-Coupled Devices
- Line-Scan Cameras
- CMOS Image Sensors
- Video Standards
- Color Images
- Other Image Sources
Image Distribution
- Image Distribution
- Frame Grabbing
- Camera Interfaces and Protocols
- Compression Techniques
- Image Standards
- Digital Imaging and Communication in Medicine (DICOM)
Image Processing
Image Analysis
- Image Analysis
- Pixel Value Analysis
- Quantitative Analysis
- Shape Matching
- Pattern Matching
- Reading Instrument Displays
- Character Recognition
- Image Focus Quality
- Application Examples
About the CD-ROM
EAN: 2147483647
Pages: 55
