Section 1.4. Processes, Threads, and Scheduling
1.4. Processes, Threads, and SchedulingThe Solaris kernel is multithreaded; that is, kernel services and tasks are executed as kernel threads. The kernel thread is the core unit of execution managed by the Solaris kernel. Kernel threads have an execution state and context that includes a global priority and scheduling class; kernel threads are the fundamental units that get scheduled, executed and context switched on and off processors. This same model applies to user level processes. The user process is a container that defines much of the execution context for its threads. Threads allow multiple streams of execution within a single virtual memory environment; consequently, switching execution between threads within the same process is inexpensive, since a virtual memory context switch is not required. The following objects form the nucleus of the Solaris kernel threads model and implementation.
Solaris executes kernel threads for kernel-related tasks, such as interrupt handling, memory page management, device drivers, etc. For user-process execution, kernel threads have a corresponding LWP; these kernel threads are scheduled for execution by the kernel on behalf of the user processes. Within the kernel, multiple threads of execution share the kernel's environment, primarily the kernel's address space. Processes also contain one or more threads, which share the virtual memory environment of the process as well as other components of the process context. A process is an abstraction that contains the execution environment for a user program. It consists of a virtual memory environment (an address space), program resources such as an open file list, and at least one thread of execution. The virtual memory environment, open file list, and other components of the process environment are shared by all the threads within each process. The LWP and its corresponding kernel thread define the virtual execution environment for a thread within a user process. Beginning in Solaris 9, there is a one-to-one relationship between user threads, LWPs, and kernel threads. That is, every thread in a user process is bound to an LWP, and each LWP has a kernel thread. The LWP allows each thread within a process to make system calls independently of other threads within the same process. Without an LWP, only one thread could enter the kernel at a timeonly one thread at a time could make a system call. Each time a system call is made by a thread, its registers are placed on a stack within the LWP. Upon return from a system call, the system call return codes are made available to the LWP. Figure 1.2 shows the relationship among user threads, LWPs, kernel threads, and processes. Figure 1.2. Kernel Threads, Processes, and Lightweight Processes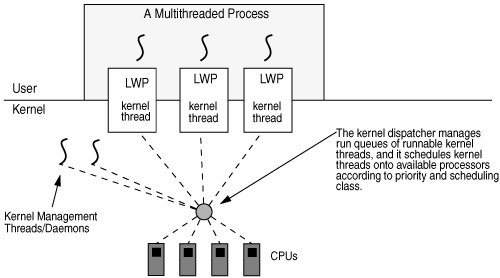 1.4.1. A New Threads ModelSolaris releases 2.2 through Solaris 8 implemented a two-level threads model, whereby user threads were multiplexed onto a potentially smaller pool of LWPs. The original design was intended to support hundreds or thousands of threads in a process, without the need to enter the kernel for many thread management tasks, such as creating and destroying threads. This model served us well for many years, but was not without its challenges. The multiplexing of user threads onto available LWPs required maintaining a runnable thread queue and user thread scheduler at the threads library levelseparate and distinct from the kernel scheduler. A user thread needed to be bound to an LWP before the kernel could schedule it to run on a processor. Maintaining a library-level threads scheduler was enormously complex. Additionally, maintaining correct asynchronous signal behavior in the two-level model was quite challenging, since a user thread that is not masking a posted signal may not be on an LWP when the system attempts to deliver the signal. Finally, issues with concurrency management and scheduling latency could result in suboptimal performance for threaded applications. The scheduling latency was the effect of waiting for the threads library scheduler to link a user thread to an available LWP. The concurrency issue has to do with maintaining a sufficient number of LWPs such that the process does not have runnable user threads waiting for an execution resource (an LWP). Beginning with Solaris 8, a new threads model was introduced: a single-level model. That is, when a user thread is created, an LWP and kernel thread are also created and linked to the user thread; the user thread is never without an LWP/kthread. This corresponds to what was referred to as bound threads in the two-level model. The threads programming interfaces provide a flag for the creation of bound threads; this flag has been available since the introduction of thread programming interfaces in Solaris. The new single-level model can be thought of as all bound threads, all the time. The new threads model was introduced in Solaris 8 through the distribution of an alternate threads library. By default, threaded applications link to /usr/lib/libthread.so, which in Solaris 8 delivers the original two-level model. An alternate libthread.so shared object library was placed in the /usr/lib/lwp directory. The new library is binary compatible with all existing threaded applications. You need not recompile to use the new threads library: simply set the runtime linker's path environmental variable to point to /usr/lib/lwp. The single-level threads library is the default library in Solaris 9 and Solaris 10, so setting the runtime linker path variable is not required in order to get the single-model behavior. The new threads model offers several benefits over the original model:
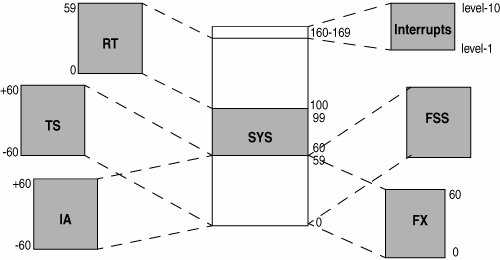
These features, as well as other benefits derived from the new threads library, are discussed in more detail in Part Two. 1.4.2. Global Process Priorities and SchedulingThe Solaris kernel implements a global thread priority model for kernel threads. The kernel scheduler, or dispatcher, uses the model to select which kernel thread of potentially many runnable kernel threads executes next. The kernel supports the notion of preemption, allowing a higher-priority thread to preempt a running thread so that the higher-priority thread can execute. The kernel itself is preemptable, an innovation providing for time-critical scheduling of high-priority threads. There are 170 global priorities; numerically larger priority values correspond to better thread priorities. The priority name space is partitioned by different scheduling classes (see Figure 1.3). The Solaris dispatcher implements multiple scheduling classes that allow different scheduling policies to be applied to threads. The three primary scheduling classes are TS (IA is an enhanced TS), SYS, and RT. The scheduling classes are shown in Figure 1.3 and described below the figure. Figure 1.3. Global Thread Priorities
The interrupt priority levels shown in Figure 1.3 are not available for use by anything other than interrupt threads. Their positioning in the priority scheme is intended to guarantee that interrupt threads have priority over all other threads in the system. The available scheduling classes, along with the user and administrator command set to observe and manage thread priorities and classes, furnish a rich environment in which any production workload, or combination of workloads, running within a single Solaris kernel instance can meet performance requirements and service levels. |
EAN: 2147483647
Pages: 244