Synchronization
The concept of mutual exclusion is a crucial one in operating systems development. It refers to the guarantee that one, and only one, thread can access a particular resource at a time. Mutual exclusion is necessary when a resource doesn't lend itself to shared access or when sharing would result in an unpredictable outcome. For example, if two threads copy a file to a printer port at the same time, their output could be interspersed. Similarly, if one thread reads a memory location while another one writes to it, the first thread will receive unpredictable data. In general, writable resources can't be shared without restrictions, whereas resources that aren't subject to modification can be shared. Figure 3-17 illustrates what happens when two threads running on different processors both write data to a circular queue.
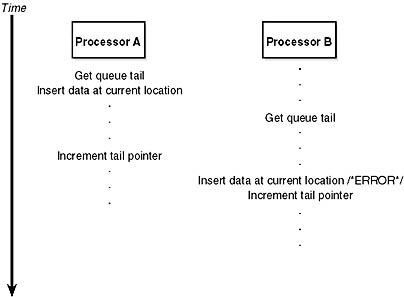
Figure 3-17 Incorrect sharing of memory
Because the second thread got the value of the queue tail pointer before the first thread had finished updating it, the second thread inserted its data into the same location that the first thread had used, overwriting data and leaving one queue location empty. Even though this figure illustrates what could happen on a multiprocessor system, the same error could occur on a single-processor system if the operating system were to perform a context switch to the second thread before the first thread updated the queue tail pointer.
Sections of code that access a nonshareable resource are called critical sections. To ensure correct code, only one thread at a time can execute in a critical section. While one thread is writing to a file, updating a database, or modifying a shared variable, no other thread can be allowed to access the same resource. The pseudocode shown in Figure 3-17 is a critical section that incorrectly accesses a shared data structure without mutual exclusion.
The issue of mutual exclusion, although important for all operating systems, is especially important (and intricate) for a tightly coupled, symmetric multiprocessing (SMP) operating system such as Windows 2000, in which the same system code runs simultaneously on more than one processor, sharing certain data structures stored in global memory. In Windows 2000, it is the kernel's job to provide mechanisms that system code can use to prevent two threads from modifying the same structure at the same time. The kernel provides mutual-exclusion primitives that it and the rest of the executive use to synchronize their access to global data structures.
In the following sections, you'll find out how the kernel uses mutual exclusion to protect its global data structures and what mutual-exclusion and synchronization mechanisms the kernel provides to the executive that it, in turn, provides to user mode.
Kernel Synchronization
At various stages during its execution, the kernel must guarantee that one, and only one, processor at a time is executing within a critical section. Kernel critical sections are the code segments that modify a global data structure such as the kernel's dispatcher database or its DPC queue. The operating system can't function correctly unless the kernel can guarantee that threads access these data structures in a mutually exclusive manner.
The biggest area of concern is interrupts. For example, the kernel might be updating a global data structure when an interrupt occurs whose interrupt-handling routine also modifies the structure. Simple single-processor operating systems sometimes prevent such a scenario by disabling all interrupts each time they access global data, but the Windows 2000 kernel has a more sophisticated solution. Before using a global resource, the kernel temporarily masks those interrupts whose interrupt handlers also use the resource. It does so by raising the processor's IRQL to the highest level used by any potential interrupt source that accesses the global data. For example, an interrupt at DPC/dispatch level causes the dispatcher, which uses the dispatcher database, to run. Therefore, any other part of the kernel that uses the dispatcher database raises the IRQL to DPC/dispatch level, masking DPC/dispatch-level interrupts before using the dispatcher database.
This strategy is fine for a single-processor system, but it's inadequate for a multiprocessor configuration. Raising the IRQL on one processor doesn't prevent an interrupt from occurring on another processor. The kernel also needs to guarantee mutually exclusive access across several processors.
The mechanism the kernel uses to achieve multiprocessor mutual exclusion is called a spinlock. A spinlock is a locking primitive associated with a global data structure, such as the DPC queue shown in Figure 3-18.
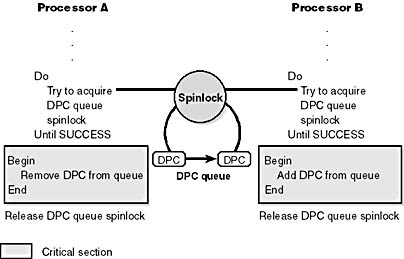
Figure 3-18 Using a spinlock
Before entering either critical section shown in the figure, the kernel must acquire the spinlock associated with the protected DPC queue. If the spinlock isn't free, the kernel keeps trying to acquire the lock until it succeeds. The spinlock gets its name from the fact that the kernel (and thus, the processor) is held in limbo, "spinning," until it gets the lock.
Spinlocks, like the data structures they protect, reside in global memory. The code to acquire and release a spinlock is written in assembly language for speed and to exploit whatever locking mechanism the underlying processor architecture provides. On many architectures, spinlocks are implemented with a hardware-supported test-and-set operation, which tests the value of a lock variable and acquires the lock in one atomic instruction. Testing and acquiring the lock in one instruction prevents a second thread from grabbing the lock between the time when the first thread tests the variable and the time when it acquires the lock.
All kernel-mode spinlocks in Windows 2000 have an associated IRQL that is always at DPC/dispatch level or higher. Thus, when a thread is trying to acquire a spinlock, all other activity at the spinlock's IRQL or lower ceases on that processor. Because thread dispatching happens at DPC/dispatch level, a thread that holds a spinlock is never preempted because the IRQL masks the dispatching mechanisms. This masking allows code executing a critical section protected by a spinlock to continue executing so that it will release the lock quickly. The kernel uses spinlocks with great care, minimizing the number of instructions it executes while it holds a spinlock.
NOTE
Because the IRQL is an effective synchronization mechanism on uniprocessors, the spinlock acquisition and release functions of uniprocessor HALs don't implement spinlocks—they simply raise and lower the IRQL.
The kernel makes spinlocks available to other parts of the executive through a set of kernel functions, including KeAcquireSpinlock and KeReleaseSpinlock. Device drivers, for example, require spinlocks in order to guarantee that device registers and other global data structures are accessed by only one part of a device driver (and from only one processor) at a time. Spinlocks are not for use by user programs—user programs should use the objects described in the next section.
Kernel spinlocks carry with them restrictions for code that uses them. Because spinlocks always have an IRQL of DPC/dispatch level or higher, as explained earlier, code holding a spinlock will crash the system if it attempts to make the scheduler perform a dispatch operation or if it causes a page fault.
Windows 2000 introduces a special type of spinlock called a queued spinlock, which is used only by the kernel and not exported for executive components or device drivers. A queued spinlock is a form of spinlock that scales better on multiprocessors than a standard spinlock. A queued spinlock work like this: When a processor wants to acquire a queued spinlock that is currently held, it places its identifier in a queue associated with the spinlock. When the processor that's holding the spinlock releases it, it hands the lock over to the first processor identified in the queue. In the meantime, a processor waiting for a busy spinlock checks the status not of the spinlock itself but of a per-processor flag that the processor ahead of it in the queue sets to indicate that the waiting processor's turn has arrived.
The fact that queued spinlocks result in spinning on per-processor flags rather than global spinlocks has two effects. The first is that the multiprocessor's bus isn't as heavily trafficked by interprocessor synchronization. The second is that instead of a random processor in a waiting group acquiring a spinlock, the queued spinlock enforces first-in, first-out (FIFO) ordering to the lock. FIFO ordering means more consistent performance across processors accessing the same locks.
Microsoft hasn't converted all the kernel's locks to queued spinlocks, just the half-dozen or so locks that protect the core data structures of the kernel, such as the cache manager's database, the scheduler's thread database, and the memory manager's physical memory database.
EXPERIMENT
Viewing Queued SpinlocksYou can view the state of queued spinlocks by using the !qlock kernel debugger command. This command is meaningful only on a multiprocessor system because uniprocessor HALs don't implement spinlocks. In the following example, the dispatcher database queued spinlock is held by processor 1, and the other queued spinlocks are not acquired. (The dispatcher database is described in Chapter 6.)
Executive Synchronization
Executive software outside the kernel also needs to synchronize access to global data structures in a multiprocessor environment. For example, the memory manager has only one page frame database, which it accesses as a global data structure, and device drivers need to ensure that they can gain exclusive access to their devices. By calling kernel functions, the executive can create a spinlock, acquire it, and release it.
Spinlocks only partially fill the executive's needs for synchronization mechanisms, however. Because waiting on a spinlock literally stalls a processor, spinlocks can be used only under the following strictly limited circumstances:
- The protected resource must be accessed quickly and without complicated interactions with other code.
- The critical section code can't be paged out of memory, can't make references to pageable data, can't call external procedures (including system services), and can't generate interrupts or exceptions.
These restrictions are confining and can't be met under all circumstances. Furthermore, the executive needs to perform other types of synchronization in addition to mutual exclusion, and it must also provide synchronization mechanisms to user mode.
The kernel furnishes additional synchronization mechanisms to the executive in the form of kernel objects, known collectively as dispatcher objects. The user-visible synchronization objects acquire their synchronization capabilities from these kernel dispatcher objects. Each user-visible object that supports synchronization encapsulates at least one kernel dispatcher object. The executive's synchronization semantics are visible to Win32 programmers through the WaitForSingleObject and WaitForMultipleObjects functions, which the Win32 subsystem implements by calling analogous system services the object manager supplies. A thread in a Win32 application can synchronize with a Win32 process, thread, event, semaphore, mutex, waitable timer, I/O completion port, or file object.
One other type of executive synchronization object worth noting is called executive resources. Executive resources provide both exclusive access (like a mutex) as well as shared read access (multiple readers sharing read-only access to a structure). However, they're available only to kernel-mode code and thus aren't accessible from the Win32 API. Executive resources are not dispatcher objects but rather data structures allocated directly from nonpaged pool that have their own specialized services to initialize, lock, release, query, and wait on them. The executive resource structure is defined in Ntddk.h, and the executive support routines are documented in the DDK reference documentation.
The remaining subsections describe the implementation details of waiting on dispatcher objects.
Waiting on Dispatcher Objects
A thread can synchronize with a dispatcher object by waiting on the object's handle. Doing so causes the kernel to suspend the thread and change its dispatcher state from running to waiting, as shown in Figure 3-19. The kernel removes the thread from the dispatcher ready queue and no longer considers it for execution.
NOTE
Figure 3-19 is a process state transition diagram with focus on the ready, waiting, and running states (the states related to waiting on objects). The other states are described in Chapter 6.
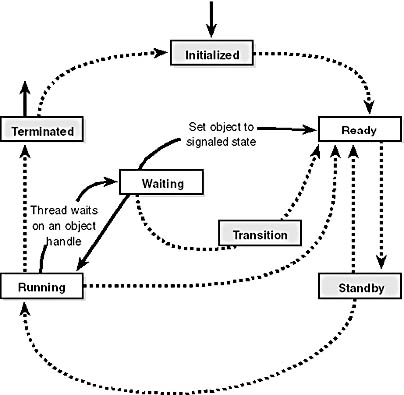
Figure 3-19 Waiting on a dispatcher object
At any given moment, a synchronization object is in one of two states: either the signaled state or the nonsignaled state. A thread can't resume its execution until the kernel changes its dispatcher state from waiting to ready. This change occurs when the dispatcher object whose handle the thread is waiting on also undergoes a state change, from the nonsignaled state to the signaled state (when a thread sets an event object, for example). To synchronize with an object, a thread calls one of the wait system services the object manager supplies, passing a handle to the object it wants to synchronize with. The thread can wait on one or several objects and can also specify that its wait should be canceled if it hasn't ended within a certain amount of time. Whenever the kernel sets an object to the signaled state, the kernel's KiWaitTest function checks to see whether any threads are waiting on the object. If they are, the kernel releases one or more of the threads from their waiting state so that they can continue executing.
The following example of setting an event illustrates how synchronization interacts with thread dispatching:
- A user-mode thread waits on an event object's handle.
- The kernel changes the thread's scheduling state from ready to waiting and then adds the thread to a list of threads waiting for the event.
- Another thread sets the event.
- The kernel marches down the list of threads waiting on the event. If a thread's conditions for waiting are satisfied, *the kernel changes the thread's state from waiting to ready. If it is a variable-priority thread, the kernel might also boost its execution priority.
- Because a new thread has become ready to execute, the dispatcher reschedules. If it finds a running thread with a priority lower than that of the newly ready thread, it preempts the lower-priority thread and issues a software interrupt to initiate a context switch to the higher-priority thread.
- If no processor can be preempted, the dispatcher places the ready thread in the dispatcher ready queue to be scheduled later.
What Signals an Object
The signaled state is defined differently for different objects. A thread object is in the nonsignaled state during its lifetime and is set to the signaled state by the kernel when the thread terminates. Similarly, the kernel sets a process object to the signaled state when the process's last thread terminates. In contrast, the timer object, like an alarm, is set to "go off" at a certain time. When its time expires, the kernel sets the timer object to the signaled state.
When choosing a synchronization mechanism, a program must take into account the rules governing the behavior of different synchronization objects. Whether a thread's wait ends when an object is set to the signaled state varies with the type of object the thread is waiting on, as Table 3-9 illustrates.
Table 3-9 Definitions of the Signaled State
| Object Type | Set to Signaled State When | Effect on Waiting Threads |
|---|---|---|
| Process | Last thread terminates | All released |
| Thread | Thread terminates | All released |
| File | I/O operation completes | All released |
| Event (notification type) | Thread sets the event | All released |
| Event (synchronization type) | Thread sets the event | One thread released; event object reset |
| Semaphore | Semaphore count drops by 1 | One thread released |
| Timer (notification type) | Set time arrives or time interval expires | All released |
| Timer (synchronization type) | Set time arrives or time interval expires | One thread released |
| Mutex | Thread releases the mutex | One thread released |
| File | I/O completes | All threads released |
| Queue | Item is placed on queue | One thread released |
When an object is set to the signaled state, waiting threads are generally released from their wait states immediately. Some of the kernel dispatcher objects and the system events that induce their state changes are shown in Figure 3-20.
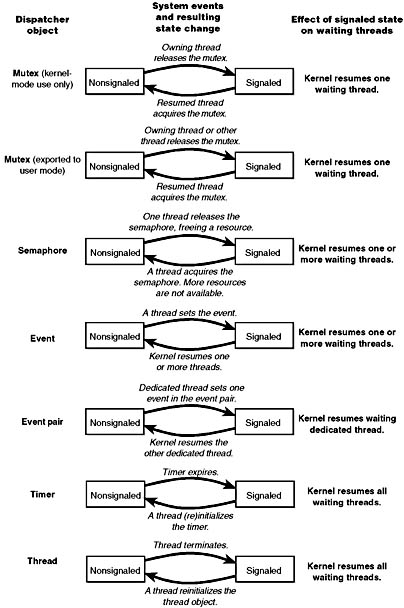
Figure 3-20 Selected kernel dispatcher objects
For example, a notification event object (called a manual reset event in the Win32 API) is used to announce the occurrence of some event. When the event object is set to the signaled state, all threads waiting on the event are released. The exception is any thread that is waiting on more than one object at a time; such a thread might be required to continue waiting until additional objects reach the signaled state.
In contrast to an event object, a mutex object has ownership associated with it. It is used to gain mutually exclusive access to a resource, and only one thread at a time can hold the mutex. When the mutex object becomes free, the kernel sets it to the signaled state and then selects one waiting thread to execute. The thread selected by the kernel acquires the mutex object, and all other threads continue waiting.
This brief discussion wasn't meant to enumerate all the reasons and applications for using the various executive objects but rather to list their basic functionality and synchronization behavior. For information on how to put these objects to use in Win32 programs, see the Win32 reference documentation on synchronization objects or Jeffrey Richter's Programming Applications for Microsoft Windows.
Data Structures
Two data structures are key to tracking who is waiting on what: dispatcher headers and wait blocks. Both these structures are publicly defined in the DDK include file Ntddk.h. The definitions are reproduced here for convenience:
typedef struct _DISPATCHER_HEADER { UCHAR Type; UCHAR Absolute; UCHAR Size; UCHAR Inserted; LONG SignalState; LIST_ENTRY WaitListHead; } DISPATCHER_HEADER; typedef struct _KWAIT_BLOCK { LIST_ENTRY WaitListEntry; struct _KTHREAD *RESTRICTED_POINTER Thread; PVOID Object; struct _KWAIT_BLOCK *RESTRICTED_POINTER NextWaitBlock; USHORT WaitKey; USHORT WaitType; } KWAIT_BLOCK, *PKWAIT_BLOCK, *RESTRICTED_POINTER PRKWAIT_BLOCK; |
The dispatcher header contains the object type, signaled state, and a list of the threads waiting on that object. The wait block represents a thread waiting on an object. Each thread that is in a wait state has a list of the wait blocks that represent the objects the thread is waiting on. Each dispatcher object has a list of the wait blocks that represent which threads are waiting on the object. This list is kept so that when a dispatcher object is signaled, the kernel can quickly determine who is waiting on that object. The wait block has a pointer to the object being waited on, a pointer to the thread waiting on the object, and a pointer to the next wait block (if the thread is waiting on more than one object). It also records the type of wait (any or all) as well as the position of that entry in the array of handles passed by the thread on the WaitForMultipleObjects call (zero if the thread was waiting on only one object).
Figure 3-21 shows the relationship of dispatcher objects to wait blocks to threads. In this example, thread 1 is waiting on object B, and thread 2 is waiting on objects A and B. If object A is signaled, the kernel will see that because thread 2 is also waiting on another object, thread 2 can't be readied for execution. On the other hand, if object B is signaled, the kernel can ready thread 1 for execution right away since it isn't waiting on any other objects.
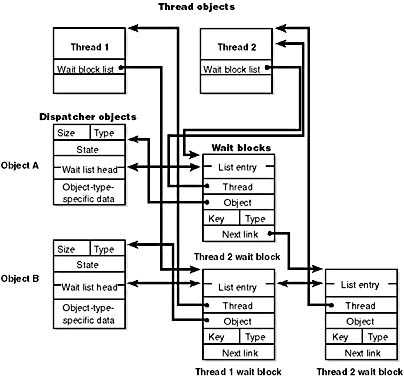
Figure 3-21 Wait data structures
EXPERIMENT
Looking at Wait QueuesAlthough many process viewer utilities indicate whether a thread is in a wait state (and if so, what kind of wait), you can see the list of objects a thread is waiting on only with the kernel debugger !thread command. For example, the following excerpt from the output of a !process command shows that the thread is waiting on an event object:
THREAD 80618030 Cid 97.7f Teb: 7ffde000 Win32Thread: e199cea8 WAIT: (WrUserRequest) UserMode Non-Alertable 805b4ab0 SynchronizationEvent
Although the kernel debugger doesn't have a command for formatting the contents of a dispatcher header, we know the layout (described in the previous section "Data Structures") so we can interpret its contents manually:
From this, we can ascertain that no other threads are waiting on this event object because the wait list head forward and backward pointers (the third and fourth 32-bit values) point to the same location (a single wait block). Dumping the wait block (at address 0x8061809c) yields the following:
The first two 32-bit values point to the list head of the wait blocks in the dispatcher header. The third 32-bit value is the pointer to the thread object. The fourth value points to the dispatcher object itself. The fifth value (0x8061809c) is the pointer to the next wait block. From this, we can conclude that the thread is not waiting on any other objects, since the next wait block field points to the wait block itself.
EAN: 2147483647
Pages: 121