Applying the Runge-Kutta Method to Second-Order Initial Value Problems
Problem
You need to numerically solve a second-order differential equation of the form:


Solution
This is a standard initial value problem, and you can implement any of a number of standard numerical integration techniques to solve it using Excel and VBA.
Discussion
Consider this equation and initial conditions:


Physically, this equation represents the equation of motion for an object moving under some applied thrust, T.[*] Here, m represents the mass of the object, Cd represents a drag factor, and s represents the displacement (position) of the object. This equation allows us to compute the motion of this object.
[*] This problem was adapted from an example I used in one of my previous books, Physics for Game Developers (O'Reilly).
To solve this equation, it helps to rewrite it in the form of two first-order equations. Let v = ds/dt represent the velocity of the object. Now we have the following:



These equations represent two coupled first-order equations, and you can apply any of a number of numerical integration schemes to solve them both.
|

I decided to use the Runge-Kutta method for this example. This method is based on taking more terms in the Taylor series expansion of a function, as I explained in Recipe 11.1. The caveat here is that you need to apply further Taylor series expansions to estimate the higher-order derivatives. The Runge-Kutta approach reduces the truncation error to something on the order of (dt)5, as opposed to (dt)2 in the case of Euler's basic method (dt is the step size). This means you can usually use larger step sizes while still maintaining accuracy. The trade-off here is more computations per step. But ultimately, with the larger step size you should be able to reduce the overall computational burden using this method.
The Runge-Kutta integration formulas are a little more complicated than the simple formula we used with Euler's basic method. The general equations are as follows:




y' represents dy/dx in these equations. You can see that every step requires four intermediate computations prior to predicting the next y-value, that is, y(x + dx).
Example 11-3 shows the VBA subroutine I wrote implementing these formulas.
Example 11-3. Implementation of Runge-Kutta method
Public Sub DoRK2ndOrder( )
Dim T As Double ' Thrust
Dim Cd As Double ' Drag coefficient
Dim M As Double ' Mass
Dim dt As Double ' Time step size
Dim F As Double ' Force
Dim A As Double ' Acceleration
Dim Vn As Double ' Velocity at time t
Dim Vn1 As Double ' Velocity at time t + dt
Dim Sn As Double ' Displacement at time t
Dim Sn1 As Double ' Displacement at time t + dt
Dim time As Double ' Total time
Dim k1 As Double ' Runge-Kutta k1
Dim k2 As Double ' Runge-Kutta k2
Dim k3 As Double ' Runge-Kutta k3
Dim k4 As Double ' Runge-Kutta k4
Dim n As Integer ' Counter controlling total number of time steps
Dim C As Integer ' Counter controlling output of results to spreadsheet
Dim k As Integer ' Counter controlling output row
Dim r As Integer ' Number of output rows
' Extract given data from the active spreadsheet:
With ActiveSheet
dt = .Range("dt")
T = .Range("T")
M = .Range("M")
Cd = .Range("Cd")
n = .Range("n")
r = .Range("r_")
End With
' Initialize variables:
k = 1
time = 0
C = n / r
Vn = 0
Sn = 0
' Start iterations:
For i = 1 To n
' Compute k1:
F = (T - (Cd * Vn))
A = F / M
k1 = dt * A
' Compute k2:
F = (T - (Cd * (Vn + k1 / 2)))
A = F / M
k2 = dt * A
' Compute k3:
F = (T - (Cd * (Vn + k2 / 2)))
A = F / M
k3 = dt * A
' Compute k4:
F = (T - (Cd * (Vn + k3)))
A = F / M
k4 = dt * A
' Compute velocity at t + dt:
Vn1 = Vn + (k1 + 2 * k2 + 2 * k3 + k4) / 6
' Compute displacement at t + dt using Euler prediction:
Sn1 = Sn + Vn1 * dt
' Update variables:
time = time + dt
Vn = Vn1
Sn = Sn1
' Output results to the active spreadsheet:
If C >= n / r Then
ActiveSheet.Cells(k + 1, 1) = time
ActiveSheet.Cells(k + 1, 2) = Sn
ActiveSheet.Cells(k + 1, 3) = Vn
k = k + 1
C = 0
Else
C = C + 1
End If
Next i
End Sub
|
This is a relatively long subroutine compared to the one shown in Example 11-2 implementing Euler's method, so I commented this one to help you navigate through it.
As usual, several local variables are declared at the beginning of the subroutine. There are a bunch of them here, so I labeled each one in Example 11-3 to indicate their respective purposes.
After the variables are declared, several of them are populated with data retrieved from the active spreadsheet. The spreadsheet is shown in Figure 11-4.
Figure 11-4. Solution using the Runge-Kutta method
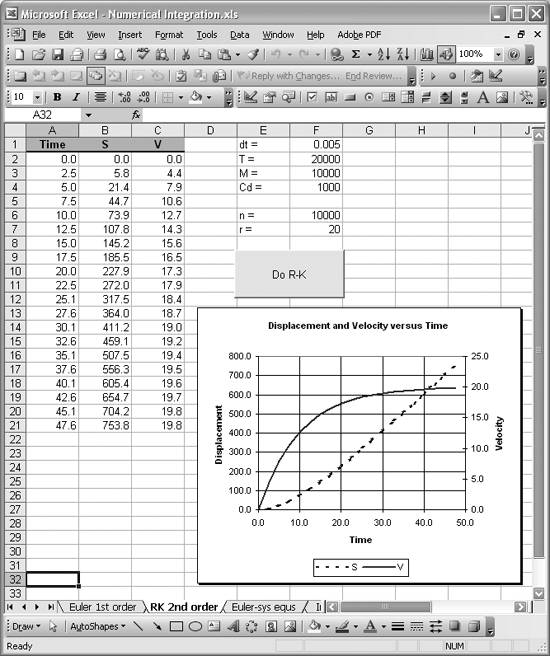
Values retrieved from the spreadsheet include the time-step size, thrust, mass, drag coefficient, number of iterations, and number of output rows. The block of code in Example 11-3 containing the With statement performs the data retrieval. Notice that I use cell names to refer to the spreadsheet cells containing the data of interest.
|
The next little section of code simply initializes a few variables. This is where the initial values for displacement and velocity specified in the problem are set.
Next, the For loop iterates computing estimates for displacement and velocity at each step. Taking a closer look at the code within the For loop, you can see how I applied the Runge-Kutta formulas to compute vt+dt. To make things a little more intuitive (at least to me), I broke the computations of the k-values into a few steps, using the analogy of Newton's second law of motion. F in these computations stands for the sum of forces. For this problem, the sum of forces is composed of the thrust force and the drag force. A then represents the object's acceleration, which is equal to the net force divided by the object's mass. Finally, the k-values are computed by multiplying the acceleration by the time step.
I find it easier to think in terms of physical values like force and acceleration whenever possible. Knowing that acceleration is equal to dv/dt, you can readily see that acceleration corresponds to y' in the Runge-Kutta formulas for this particular problem. This is because we broke the original equation up and are dealing with the first one involving velocity.
After all of the k-values are obtained, vt+dt is estimated using the Runge-Kutta formula discussed earlier. Next, a simple Euler estimate is made for the corresponding displacement, st+dt.
Finally, the results are sent to the active spreadsheet in the same manner I showed you in Recipe 11.1. Figure 11-4 shows the results, including a plot of velocity and displacement versus time, using a time step of 0.005. You should play around with this time step to see how the accuracy of the results is affected. (If this were a class, I'd assign that exercise for homework.)
I should also mention that I used a button control, as you can see in Figure 11-4, to call the subroutine when the button is clicked. Refer back to Recipe 9.3 to learn how to add this sort of button control and assign its functionality.
Using Excel
- Introduction
- Navigating the Interface
- Entering Data
- Setting Cell Data Types
- Selecting More Than a Single Cell
- Entering Formulas
- Exploring the R1C1 Cell Reference Style
- Referring to More Than a Single Cell
- Understanding Operator Precedence
- Using Exponents in Formulas
- Exploring Functions
- Formatting Your Spreadsheets
- Defining Custom Format Styles
- Leveraging Copy, Cut, Paste, and Paste Special
- Using Cell Names (Like Programming Variables)
- Validating Data
- Taking Advantage of Macros
- Adding Comments and Equation Notes
- Getting Help
Getting Acquainted with Visual Basic for Applications
- Introduction
- Navigating the VBA Editor
- Writing Functions and Subroutines
- Working with Data Types
- Defining Variables
- Defining Constants
- Using Arrays
- Commenting Code
- Spanning Long Statements over Multiple Lines
- Using Conditional Statements
- Using Loops
- Debugging VBA Code
- Exploring VBAs Built-in Functions
- Exploring Excel Objects
- Creating Your Own Objects in VBA
- VBA Help
Collecting and Cleaning Up Data
- Introduction
- Importing Data from Text Files
- Importing Data from Delimited Text Files
- Importing Data Using Drag-and-Drop
- Importing Data from Access Databases
- Importing Data from Web Pages
- Parsing Data
- Removing Weird Characters from Imported Text
- Converting Units
- Sorting Data
- Filtering Data
- Looking Up Values in Tables
- Retrieving Data from XML Files
Charting
- Introduction
- Creating Simple Charts
- Exploring Chart Styles
- Formatting Charts
- Customizing Chart Axes
- Setting Log or Semilog Scales
- Using Multiple Axes
- Changing the Type of an Existing Chart
- Combining Chart Types
- Building 3D Surface Plots
- Preparing Contour Plots
- Annotating Charts
- Saving Custom Chart Types
- Copying Charts to Word
- Recipe 4-14. Displaying Error Bars
Statistical Analysis
- Introduction
- Computing Summary Statistics
- Plotting Frequency Distributions
- Calculating Confidence Intervals
- Correlating Data
- Ranking and Percentiles
- Performing Statistical Tests
- Conducting ANOVA
- Generating Random Numbers
- Sampling Data
Time Series Analysis
- Introduction
- Plotting Time Series Data
- Adding Trendlines
- Computing Moving Averages
- Smoothing Data Using Weighted Averages
- Centering Data
- Detrending a Time Series
- Estimating Seasonal Indices
- Deseasonalization of a Time Series
- Forecasting
- Applying Discrete Fourier Transforms
Mathematical Functions
- Introduction
- Using Summation Functions
- Delving into Division
- Mastering Multiplication
- Exploring Exponential and Logarithmic Functions
- Using Trigonometry Functions
- Seeing Signs
- Getting to the Root of Things
- Rounding and Truncating Numbers
- Converting Between Number Systems
- Manipulating Matrices
- Building Support for Vectors
- Using Spreadsheet Functions in VBA Code
- Dealing with Complex Numbers
Curve Fitting and Regression
- Introduction
- Performing Linear Curve Fitting Using Excel Charts
- Constructing Your Own Linear Fit Using Spreadsheet Functions
- Using a Single Spreadsheet Function for Linear Curve Fitting
- Performing Multiple Linear Regression
- Generating Nonlinear Curve Fits Using Excel Charts
- Fitting Nonlinear Curves Using Solver
- Assessing Goodness of Fit
- Computing Confidence Intervals
Solving Equations
- Introduction
- Finding Roots Graphically
- Solving Nonlinear Equations Iteratively
- Automating Tedious Problems with VBA
- Solving Linear Systems
- Tackling Nonlinear Systems of Equations
- Using Classical Methods for Solving Equations
Numerical Integration and Differentiation
- Introduction
- Integrating a Definite Integral
- Implementing the Trapezoidal Rule in VBA
- Computing the Center of an Area Using Numerical Integration
- Calculating the Second Moment of an Area
- Dealing with Double Integrals
- Numerical Differentiation
Solving Ordinary Differential Equations
- Introduction
- Solving First-Order Initial Value Problems
- Applying the Runge-Kutta Method to Second-Order Initial Value Problems
- Tackling Coupled Equations
- Shooting Boundary Value Problems
Solving Partial Differential Equations
- Introduction
- Leveraging Excel to Directly Solve Finite Difference Equations
- Recruiting Solver to Iteratively Solve Finite Difference Equations
- Solving Initial Value Problems
- Using Excel to Help Solve Problems Formulated Using the Finite Element Method
Performing Optimization Analyses in Excel
- Introduction
- Using Excel for Traditional Linear Programming
- Exploring Resource Allocation Optimization Problems
- Getting More Realistic Results with Integer Constraints
- Tackling Troublesome Problems
- Optimizing Engineering Design Problems
- Understanding Solver Reports
- Programming a Genetic Algorithm for Optimization
Introduction to Financial Calculations
- Introduction
- Computing Present Value
- Calculating Future Value
- Figuring Out Required Rate of Return
- Doubling Your Money
- Determining Monthly Payments
- Considering Cash Flow Alternatives
- Achieving a Certain Future Value
- Assessing Net Present Worth
- Estimating Rate of Return
- Solving Inverse Problems
- Figuring a Break-Even Point
Index
EAN: 2147483647
Pages: 206
