Reducing the Noise Level
|
| < Day Day Up > |
|
(Based on materials from and with the permission of the Russian-language ComputerPress magazine and http://www.ixbt.com Web site.)
PCs are widely used not only in an office or production environment, but also in homes, where the elimination of undesirable sounds can be an urgent problem. However, the increased performance of processors, video adapters, hard disks, and CD/DVD drives can impose stringent requirements on temperature and require an additional cooling system. This inevitably increases the background noise.
Furthermore, as computers acquire additional consumer functions, such as multimedia centers, digital audio- and video-recorders, game stations, or Internet terminals, the intensity of their operation grows. Therefore, the problem of reducing background noise becomes even more important.
Contemporary ecological and ergonomic requirements limit the noise produced by any home appliance, and computers are no exception. Furthermore, turning a home PC into a home theater and audio center, the elimination of background noise turns into an economical problem. It doesn't make sense to spend money on high-quality video components or audio systems if sound will be accompanied by annoying background noise.
As a result, leading manufacturers of computer hardware have begun to pay attention to the acoustic characteristics of their products. Requirements become more stringent as computers move closer to home appliances.
Unfortunately, contemporary PCs are far behind audio and video systems in this parameter. Until the designers of hardware components change their approach to manufacturing computer equipment, PC users will have to improve existing equipment and choose appropriate components on their own.
Theoretical Background
The range of sounds that can be heard by humans generally is thought to span from 20 MHz to 20,000 Hz.
Noise levels are evaluated using sound pressure and acoustic intensity.
Sound pressure is a relative value characterized by an increase in air pressure on the eardrum, caused by sound oscillations (measured in pascals, with 1 Pa = 1 N/m2).
Acoustic intensity is the power of a sound wave per area unit (measured in W/m2). This is the value proportional to the square of the sound pressure.
The range of acoustic intensities perceived by humans is limited from below by the sensitivity of the eardrum (the so-called audibility threshold) and from above by the threshold of pain.
The audibility threshold depends on frequency. It is generally thought that sound with a frequency of 1 kHz, producing sound pressure of about 20 micropascals (μPa) at an ambient temperature of 20°C (68°F), is perceivable. Sound intensity at this pressure is 1 picowatts (pW), much weaker than a mosquito's buzz. This threshold value is assumed to correspond to 0 decibels (dB). The threshold of pain at the same frequency corresponds to the sound pressure of 20 Pa. (Sound intensity is equal to 1 W/m2, which approximately corresponds to the roar of a supersonic engine if a fighter jet takes off nearby.) This sound level equals 120 dB.
Thus, the range of sound intensity distinguished by humans is sufficiently wide. When measuring this value, it is convenient to use relative units (i.e., the level relative to the audibility threshold).
Volume is measured in decibels and depends on the sound pressure, as shown in the following formula:
D = 20 lg (P/Pmin)
Here, P is the current value of the sound pressure, and Pmin is the value of the sound pressure for the audibility threshold.
Volume and noise level, expressed in sound intensity, have half the proportionality coefficient, as shown in the following formula:
D = 10 lg (I/Imin)
Here, I and Imin are the current and threshold values of the sound intensity.
The sound intensity is used most frequently as a characteristic of the noise level. The measurement results must be ranked depending on the sound frequency and the characteristics of human hearing. Curves of equal volumes are shown in Fig. 17.3.
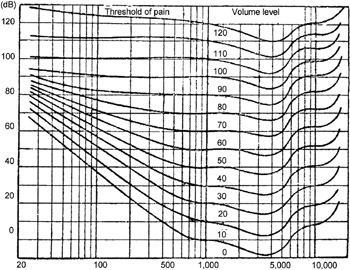
Figure 17.3: Curves of equal volume
The dynamic range of a sound source is the difference between its minimum and maximum volume in decibels. For example, the minimum volume for speech perception is 25–30 dB (a whisper), low conversation corresponds to 35–45 dB, and so on.
Clear perception of sound is possible only when its intensity exceeds by at least 10 dB noise within the same frequency range.
Thus, unwanted sounds are injurious because they decrease the dynamic range of the desired sound sources. This decrease is often so significant that the desired sound can't be distinguished from background noise.
For example, the typical level of noise from a contemporary computer is 35–45 dB. This means that people can't perceive a whisper and have difficulties understanding soft voices near the computer. As a result, it is necessary to speak louder (for example, by raising the voice to 50–55 dB). You can forget about listening to high-quality recordings; this would require the volume to be increased to the threshold of pain.
Average background noise at home rarely exceeds 35 dB, and at night it usually decreases to 20 dB. This is the most important factor determining the requirements of a home computer. If the home user plans to work only during the day, noise from the computer must not exceed 30 dB. For comfortable work at night, greater noise reduction is required — to at least 20 dB.
Requirements for computers operating in professional sound-recording premises are stringent. Because of this, sound professionals do not try to keep pace with the latest technological advances in processors; they purchase expensive cases with high-quality noise insulation.
To successfully reduce the noise emitted from a computer, it is necessary to consider its main sources.
Noise Sources in Computers
Noise produced by computers comes from sound oscillations generated by mechanical drives, amplified many times by resonating elements of the construction. The main sources of mechanical oscillations and vibrations in a computer are the following:
-
Power supply unit (its fan and transformers)
-
Fan of the CPU cooler
-
Fan of the cooler installed on a high-performance video adapter
-
Additional cooling fans that might be installed in the case of the system unit (or in the cases of peripheral devices)
-
Drives and media (hard disks, optical drives, and so on) as a result of spindle rotation (constant) and positioning the read/write heads (periodic)
Controlling Fans
The largest contribution to the noise produced by a contemporary computer comes from numerous coolers and fans. The average noise level from a single fan is approximately 35 dB. The difference from model to model might be considerable.
Although fans regularly are improved, their contribution to the noise pollution of the system tends to grow.
The design of the first PCs didn't include fans. Clock frequencies of the first processors were so low they didn't cause heat emission that would require additional cooling. To achieve adequate cooling, heat transmission via heatsinks and the computer case was sufficient; free airflow convection via ventilation holes dispersed heat from the case. In the first power supply units, only powerful transformers produced noise. Later, power supply units became the pulse-based, and transformers became small and relatively noiseless. However, a new, powerful noise source appeared — the fan in the power supply unit.
Starting with some Intel 486 models, heatsinks appeared with fans on tops of the processors. The noise problem became urgent for processors such as Intel Pentium 4 and AMD Athlon XP, which required intense cooling. Video adapters also appeared, equipped with a couple of fans. Fig. 17.4 shows coolers for Intel 486-100 and Intel Pentium 4 3.06 GHz processors.
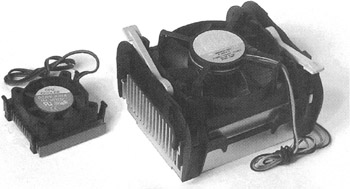
Figure 17.4: Coolers for Intel 486-100 and Intel Pentium 4 3.06 GHz processors
In addition to the fans installed in the power supply unit, processor, and other hardware components, it gradually became necessary to build fans into the system unit case. Currently, even motherboard chipsets are equipped with a separate heat-sink, with a fan on top. Quite often, hard drives also require additional cooling. Thus, a contemporary computer typically contains five or more coolers.
The main source of noise in any fan is produced from the mechanics and airflow — air moved by the blades and blown through the fins of the heatsink, small holes in the sides of the case, and outlets in the rear or front panels of the case.
At first, it seems intolerable to decrease the performance of cooling facilities; this might violate the temperature modes required for operation of the hardware components. However, because the workload on each component is not constant, it is expedient to decrease the fan rotation speeds during periods of low workload. This will reduce the noise caused by their operation.
To decrease the rotation speed of the blades, it is necessary to use specialized fans or complement the cooling devices with specially designed circuits. The designs of these circuits can vary from simple, with manual control over the voltage, to complicated, with automatic control using a thermal sensor. It is necessary to warn against using too simplistic of an approach. Many models of 12 V fans are capable of stable operation at a supply voltage of 5 V. In this case, the fan rotation speed will be approximately half the nominal speed. However, not every model will start at such a voltage. Supplying a voltage of 7 V by taking +5 V as the "ground" and +12 V from another contact doesn't save the situation. In this case, the fan might stop after reboot.
It is possible to start fans at their nominal voltages and gradually decrease them to the required level — for example, to the half of the nominal voltage. One possible implementation of such a plan is shown in Fig. 17.5.
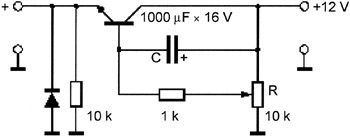
Figure 17.5: Circuit design ensuring fan startup, with subsequent decrease of the supply voltage to the required level
This circuit design is based on a simple principle: At the moment the computer powers up, the base potential of the transistor (T) equals the potential on its collector. This ensures supply of the full power (12 V) to the fan connected to the transistor's emitter. As the capacitor (C) charges (this takes several seconds), the voltage is decreased to the level set by the variable resistor (R). By changing the position of this resistor, it is possible to control the fan rotation speed during operation.
To implement this device, it is possible to use a powerful n-p-n transistor that guarantees the current required for the collector-emitter voltage is no less than 12 V. A low-power diode can protect the transistor from breaking down during transient processes that take place in relatively powerful fans. It is expedient to choose a diode model intended for voltages greater than 100 V and currents greater than 50 mA.
The design is connected to the power supply wire of the cooling fan. Connection of the ground (GND) wire remains unchanged, except that the common wire of this regulator is connected to it.
This solution can be used to control the fans included in a processor cooler, a video adapter, and even a power supply unit.
The main drawback of this plan is the necessity of constant control over the temperature of the elements being cooled.
The heatsink temperature or even the air temperature within the computer case can be used as a parameter that determines the necessity of choosing a speed of fan rotation. Therefore, many manufacturers supply fans with built-in thermal sensors (Fig. 17.6).
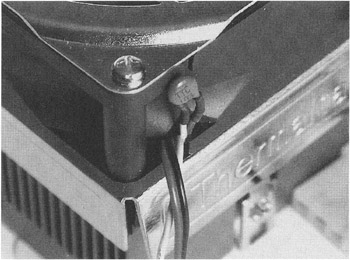
Figure 17.6: Thermal sensor built into the cooler
Until the temperature exceeds a predefined limit, the fans might operate at half of their nominal power or even stop. When the temperature increases to the predefined limit, the fans gradually speed up to their nominal power.
It is possible to produce efficient devices that ensure automatic control over the heatsink temperature and fan rotation speed on your own.
As an example, consider two plans for simple analogous regulators with thermal sensors fastened to the cooler heatsink. The first design is based on a chip; the second one employs transistors.
If the cooler has no output for a tachometer (or if this output is not used), the rotation speed regulator can based on the circuit containing minimal components (Fig. 17.7).
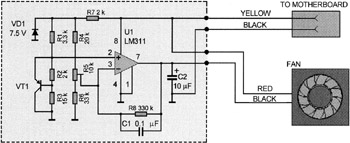
Figure 17.7: Schematic circuit of a thermal regulator based on an LM311 chip
This regulator is based on an LM311 chip. Although this chip is a comparator, the device ensures linear regulation, rather than switching-type regulation. A comparator, instead of an operational amplifier, was chosen for the following reasons:
-
The comparator has a relatively powerful output with an open collector, which allows the fan to be connected directly, without additional transistors.
-
Because the input cascade is based on p-n-p transistors connected in a common collector design, even with a unidirectional power supply, it is possible to work with low input voltages at the ground level. For example, when using a diode as a thermal sensor, it may be necessary to work with a 0.7 V input, which is not supported by most contemporary operational amplifiers.
-
The comparator can be enveloped in negative feedback, after which it will operate in a way similar to operational amplifiers.
Diodes are used frequently as thermal sensors. Silicone diodes have a p-n transition with a thermal voltage coefficient of approximately -2.3 mV/°C and a direct voltage drop of approximately 0.7 V. However, most diodes have a case unsuitable for fastening on a heatsink. Some transistors are more suitable for this.
Some transistors have cases designed for fastening on a heatsink using a screw. However, when using such transistors, remember that after fastening the transistor to the heatsink, its collector will be connected to it electrically. Because of the convenience of assembling and ensuring electric safety, the heatsink must be connected electrically to the common power supply wire. Therefore, it is most convenient to use a p-n-p transistor (VT1) in this device.
Note that it is possible to use one of the transistors simply as a diode in the thermal control circuit. However, the diode has a relatively low thermal coefficient, and measurements are performed under unfavorable conditions — the supply voltage is unstable and there are background noises and interference.
Using a transistor connected as a dipole, as shown in Fig 7.17, is a better approach. The temperature coefficient of such a sensor is determined by the ratio of the R2 and R3 resistance, based on the following formula:
Kt × (R3/R2 + 1)
Here, Kt is the temperature coefficient of a single p-n transition. It is impossible to increase the value of the resistor ratio without limitations, because a direct-voltage drop grows with the increase of the thermal coefficient. It can even reach the supply voltage, meaning the system will cease to operate. In the regulator being described, the thermal coefficient of the sensor is approximately -20 mV/°C, ten times the similar parameter of the diode. The direct-voltage drop on the transistor is about 6 V.
The VT1R2R3 thermal sensor is included in the measuring bridge composed of the R1, R4, R5, and R6 resistors. The bridge is powered from the VD1R7 parametric voltage stabilizer, because the +12 V supply voltage within the computer isn't known for stability.
The misbalance voltage of the measuring bridge is applied to the comparator inputs. The comparator is used in linear mode because of the influence of the inverse feedback. The R5 correcting resistor allows the correcting characteristic curve to be displaced. Changing the nominal value of the R8 feedback resistor changes the angle of its slope. The C1 and C2 capacitors ensure stability of the regulator.
The regulator is mounted on a board made of single-sided, foil-clad fiberglass laminate (Fig. 17.8).
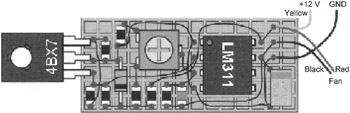
Figure 17.8: Wiring diagram of a thermal regulator based on an LM311 chip
To decrease the external dimensions of the board, it is expedient to use surface-mountable elements. It is possible to use ordinary elements. The board is fastened at the cooler heatsink using the fastening screw of the VT1 transistor. It is best to drill a small hole into the heatsink and cut a thread for the M3 screw. It is possible to use a screw and nut. When choosing where to fasten the board on the heatsink, ensure an easy access to the correcting resistor after the heatsink is installed in the computer. Using this approach, it is not difficult to fasten the thermal regulator board to typical heatsinks. However, difficulties might arise when fastening it to a cylindrical heatsink, such as the popular Orb.
Note that only the transistor used as a thermal sensor must have good heat contact with the heatsink. If the entire board can't be placed on the heatsink, you can install only the transistor on it. It will be necessary to connect the transistor to the board using wires. The board itself can be placed anywhere near the sensor.
The transistor can be fastened onto the heatsink without metalwork. For example, it is possible to fit it tight between the fins and ensure good heat contact using thermal paste. Heat conductive glue also can be used to fasten the thermal sensor.
After installing the transistor that performs the functions of a thermal sensor on the heatsink, the latter is connected to the common wire. This doesn't cause problems. The transistor can be easily insulated from the heatsink, such as by using a lining made of mica or Mylar.
Electrically, the plate is connected sequentially into the cutoff of the fan wire. When necessary, it is possible to install cutoff points to avoid cutting the wire. A correctly assembled design requires little tuning; just use the R5 correction resistor to set the fan rotation speed corresponding to the current temperature. Each fan has a minimal voltage that must be supplied to make the fan rotate. By tuning the regulator, it is possible to make the fan rotate at the minimal rotation speed when the heatsink temperature is close to the ambient temperature. Nevertheless, the thermal resistance of different heatsinks can vary; therefore, it might be necessary to correct the slope of the correction characteristic curve.
The slope of the curve is specified by the nominal value of the R8 resistor. This value can range from 100 kilohm to 1,000 kilohm. The greater this nominal value, the lower the temperature at which the fan reaches its maximum rotation speed. The processor workload can be only several percent, a situation that often takes place when working in text editors. When using a software cooler, the fan might run at a much slower speed. This regulator is intended to do the same. However, as the processor workload increases, its temperature rises. The regulator must gradually increase the fan supply voltage to the maximum to prevent the processor from being overheated. The heatsink temperature must not rise too high when the fan starts to rotate at full speed. It must be 5°C–10°C (41°F–50°F) below the temperature at which the system starts to experience instability.
It is desirable to perform first power-on of this arrangement from an external power source. Otherwise, if the arrangement short-circuits, its link to the motherboard connector might damage the motherboard.
The second design is based on transistors.
If the fan is equipped with a tachometer, the regulating transistor cannot be connected to the ground wire of the fan. Because of this, the internal transistor of the comparator cannot be used here. An additional transistor is required to regulate the +12 V circuit of the fan. It might be possible to improve slightly the previous design based on the comparator. Nevertheless, this design, based on transistors, is more compact than the previous one. The principal circuit is shown in Fig. 17.9.
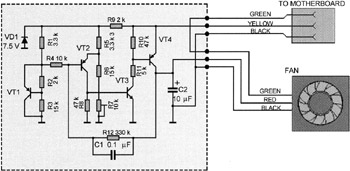
Figure 17.9: Principal diagram of a thermal regulator based on transistors
Because the entire board is placed on the heatsink and is heated, it is hard to predict the behavior of the transistor design. Researchers investigated the design using the PSpice modeling software. The modeling result is shown in Fig. 17.10.
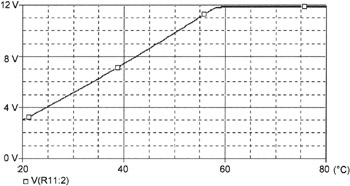
Figure 17.10: Results of modeling the design using PSpice software
As can be seen from this illustration, the fan supply voltage grows linearly, from 4 V at 25°C (77°F) to 12 V at 58°C (136°F). The regulator's behavior generally meets the requirements.
The principal circuits of these two variants of the thermal regulator have much in common. The temperature sensors and measurement bridges are practically identical. The difference is only in the voltage amplifier of the bridge. In the second variant, this voltage is supplied to the cascade represented by the VT2 transistor. The transistor base is the inverting input of the amplifier; the emitter is the noninverting input. The signal is supplied to the next amplifying cascade based on the VT3 transistor, and, finally, to the output cascade based on the VT4 transistor. The aim of the capacitor is the same as in the first variant. The wiring scheme of the regulator is shown in Fig. 17.11.
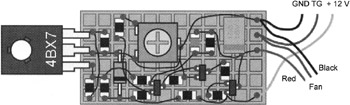
Figure 17.11: Wiring plan of a thermal regulator based on transistors
This design is similar to the first variant, except the board has smaller dimensions. In this design, it is possible to employ any elements. Besides this, any silicone, low-powered transistors can be used, because the fans consume a current that rarely exceeds 100 mA.
This design can also be used to control fans consuming stronger currents. With such fans, the VT4 transistor must be replaced with more powerful one. The signal from the tachogenerator (TG) passes through the regulator board to the connector on the motherboard. The method of tuning the second variant is no different from the first variant. In the second variant, tuning is performed using the R7 tuning resistor, and the slope of the curve is specified by the nominal of the R12 resistor.
The usage of thermal regulators (with software coolers) has demonstrated their high efficiency as tools for reducing the noise from cooling fans. The devices described here can be used to control the speed of cooling fans installed on various computer components. The cooler used on each component must be powerful enough to ensure the required temperature mode at maximum workload.
Hardware facilities considerably reduce the average noise level produced by a computer. However, as the workload grows, noise increases. This might be acceptable in an office environment. However, it is not always tolerable at home, especially in evening or at night.
Temporary usage of the modes with reduced clock frequencies (anti-overclocking) can solve this problem. As previously mentioned, this can be achieved through the appropriate settings in BIOS Setup. Setting the appropriate performance level allows control over heat emission, which allows a reduction in the workload on the coolers. As a result, the temperature is reduced, and fans decrease their rotation speed. At the same time, anti-overclocking ensures a reduction in the upper level of performance; therefore, the maximum rotation speed is not reached even if the workload is at its maximum. Thus, anti-overclocking and appropriate thermal regulators make it possible to reduce or decrease the noise level in the evening and at night.
|
| < Day Day Up > |
|
EAN: 2147483647
Pages: 111