Vehicle
We need to revisit the runabout model to prepare it for use as a mountable vehicle. The enhancement is not complex.
Model
Open the runabout model using MilkShape and add some mount nodes, as shown in Figure 22.2. These are joints, added using the Joint tool on the Model tab and named on the Joints tab.
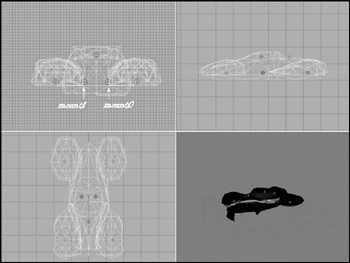
Figure 22.2: Car mount nodes.
Name the one in the driver's position mount0 and the other mount1. Re-export your car and save it to C:\koob\control\data\models\vehicles\runabout.dts.
Earlier, when you mounted the vehicle using the filler model, the model was mounted to the local origin (0,0,0) of the car. Now the model will be mounted where you've specified with the nodes.
Datablock
We need to add a few things to the datablock. Open your file C:\koob\control\server\vehicles\car.cs and find the datablock. It looks like this:
datablock WheeledVehicleData(DefaultCar)
Add the following to the end of the datablock:
mountPose[0] = "sitting"; mountPose[1] = "sitting"; numMountPoints = 2;
The properties are pretty straightforward—"sitting" refers to the name of the sequence in the model that we created earlier with the Hero model in the sitting pose. The name was defined in a special material.
Table 22.1 contains descriptions of the most significant properties available for adjustment in the WheeledVehicleData datablock.
| Command | Description |
|---|---|
| MaxDamage | Specifies the maximum number of damage points a vehicle can take before it becomes disabled. Destroyed and disabled states are calculated percentages of this value. |
| DestroyedLevel | Specifies the percentage of MaxDamage that, when reached, causes the vehicle's onDestroyed callback to be called by the engine. |
| DisabledLevel | Specifies the percentage of MaxDamage that, when reached, causes the vehicle's onDestroyed callback to be called by the engine. |
| MaxSteeringAngle | Maximum steering angle. |
| TireEmitter | Same dust emitter as used by all the tires. |
| CameraRoll | Rolls the camera with the vehicle when it rolls. |
| CameraMaxDist | Farthest distance from the vehicle in third-person view. |
| CameraOffset | Vertical offset from the camera mount point. |
| CameraLag | Velocity lag of the camera in third-person view. |
| CameraDecay | Decay per second rate of velocity lag in third-person view. |
| Mass | Mass of the vehicle in quasi-kilograms. |
| MassCenter | Center of mass for rigid body expressed in object space 3D coordinates. |
| MassBox | Size of box used for moment of inertia; if 0 it defaults to the object's bounding box. |
| Drag | Drag coefficient. Used to counteract acceleration. |
| BodyFriction | Determines "stickiness" when the body brushes against the terrain or other objects. |
| BodyRestitution | Determines, by using rigid body physics, how much deformation is reversed. |
| MinImpactSpeed | Specifies the speed at and above which the vehicle's onImpact callback will be called by the engine. |
| SoftImpactSpeed | Specifies the speed at and above which the engine will play the vehicle's SoftImpact sound. |
| HardImpactSpeed | Specifies the speed at and above which the engine will play the vehicle's HardImpact sound. |
| Integration | Physics integration: TickSec/Rate. Higher values here yield higher integration. Higher integration leads to more accurate simulation but at the potential cost of CPU performance. |
| CollisionTol | Collision distance tolerance. A higher number means that a collision will be detected sooner (objects are farther apart) than with a lower number. |
| ContactTol | Contact velocity tolerance. How much leeway is allowed in determining whether objects have collided or have merely contacted, or brushed, each other. A higher number means that a more forceful contact can occur without the contact being considered a collision. |
| EngineTorque | Engine power, which causes acceleration, which leads to higher velocities. |
| EngineBrake | Braking when throttle is 0—simulates the internal "drag" of an engine that tends to slow a vehicle when it is in gear. |
| BrakeTorque | When brakes are applied, works as the opposite of EngineTorque. |
| MaxWheelSpeed | The maximum rotation speed of the wheels, which directly affects the speed of the vehicle based on the wheel diameter and deformation factors. Wheel speed derives from engine speed and other factors. |
| MaxEnergy | The maximum amount of energy available to the vehicle for conversion into motion. Energy can be seen to be the same as fuel load. |
| JetForce | Additional boost force—a holdover term from the Tribes days. Means the same as acceleration. |
| MinJetEnergy | The smallest amount of energy needed to apply a jetting boost. |
| JetEnergyDrain | How quickly the energy of the vehicle is drained by use of jetting. |
| JetSound | The sound played when jetting or accelerating. |
| EngineSound | The sound played when the engine is idling. |
| SquealSound | The sound played when the tires skid. |
| SoftImpactSound | The sound played when a mild collision occurs. |
| HardImpactSound | The sound played when a serious collision occurs. |
| WheelImpactSound | The sound played when the wheels and tires hit something. |
Two other datablocks have significant effect on the behavior of the car: WheeledVehicleTire and WheeledVehicleSpring, shown here:
datablock WheeledVehicleTire(DefaultCarTire) { shapeFile = "~/data/models/vehicles/wheel.dts"; staticFriction = 4; kineticFriction = 1.25; lateralForce = 18000; lateralDamping = 4000; lateralRelaxation = 1; longitudinalForce = 18000; longitudinalDamping = 4000; longitudinalRelaxation = 1; }; datablock WheeledVehicleSpring(DefaultCarSpring) { // Wheel suspension properties length = 0.85; // Suspension travel force = 3000; // Spring force damping = 600; // Spring damping antiSwayForce = 3; // Lateral anti-sway force }; In the WheeledVehicleTire datablock you can see that tires act as springs in two ways: They generate lateral and longitudinal forces to move the vehicle. These distortion/spring forces are what convert wheel angular velocity into forces that act on the rigid body.
EAN: 2147483647
Pages: 197
- Key #4: Base Decisions on Data and Facts
- When Companies Start Using Lean Six Sigma
- Making Improvements That Last: An Illustrated Guide to DMAIC and the Lean Six Sigma Toolkit
- The Experience of Making Improvements: What Its Like to Work on Lean Six Sigma Projects
- Six Things Managers Must Do: How to Support Lean Six Sigma