70.
| [Cover] [Contents] [Index] |
Page 160
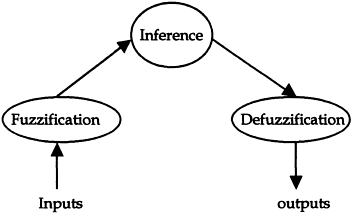
Figure 4.5 Basic architecture of fuzzy system includes fuzzification, inference and defuzzification. See text for explanation.
4.4.1 Fuzzification
The purpose of fuzzification is to partition the feature space into fuzzy subspaces and generate rules for each fuzzy subspace. Note that all fuzzy subspaces normally overlap some degree with each other (see below). To carry out the process of fuzzification, one first has to define membership functions in order to calculate the membership grade for the input pixels. Equation (4.4) is one kind of membership function that maps the input s to a grade of fuzzy membership. Although the fuzzy membership function can take any form (as long as the function can map the inputs on to the range [0, 1]), four kinds of fuzzy membership functions, known as monotonic, triangular, trapezoidal, and bell-shaped, are the most frequently used in fuzzy rule base experiments. Figure 4.6 illustrates the geometric shapes of these four types of membership functions, and the corresponding mathematical expressions are given in Equations (4.26) to (4.29), respectively.
Monotonic:
 |
(4.26) |
Triangular:
 |
(4.27) |
| [Cover] [Contents] [Index] |
EAN: 2147483647
Pages: 354