160.
| [Cover] [Contents] [Index] |
Page 241
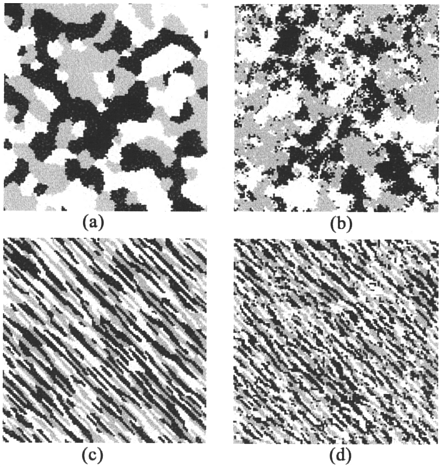
Figure 6.5 (a) and (c) were constructed by using β in case of wr wr′, while in (b) and (d) β is replaced by 0. The value of β is (0.5, 0.5, 0.5, 0.5) for (a) and (b) while β= (1, 1, 1, −1) for (c) and (d).
wr′, while in (b) and (d) β is replaced by 0. The value of β is (0.5, 0.5, 0.5, 0.5) for (a) and (b) while β= (1, 1, 1, −1) for (c) and (d).
derived from the texture or noise at low level. More details of MAP-MRF labelling are given in Section 6.3.
6.2 Construction of posterior energy
Assume that we have a set of observed feature vectors (e.g. pixel grey levels in a number of different spectral bands), which are denoted by d. Traditionally, each pixel is labelled based on d alone without considering contextual information. Once the context is included as a priori information and modelled by means of MRF, the current trend is to use the Bayesian formulation to construct an objective function called posterior energy and then to perform labelling by minimising this posterior energy. Recall that the higher the energy U(event), the lower is the probability P(event), where event can be pixel values or class labels as far as an image is concerned.
| [Cover] [Contents] [Index] |
EAN: 2147483647
Pages: 354