Section 2.2. Interprocess Communication
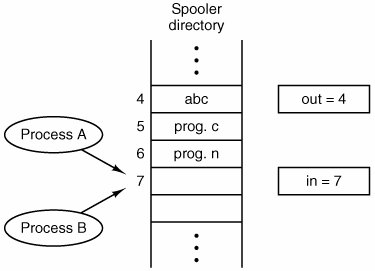
2.2. Interprocess CommunicationProcesses frequently need to communicate with other processes. For example, in a shell pipeline, the output of the first process must be passed to the second process, and so on down the line. Thus there is a need for communication between processes, preferably in a well-structured way not using interrupts. In the following sections we will look at some of the issues related to this InterProcess Communication or IPC. There are three issues here. The first was alluded to above: how one process can pass information to another. The second has to do with making sure two or more processes do not get into each other's way when engaging in critical activities (suppose two processes each try to grab the last 1 MB of memory). The third concerns proper sequencing when dependencies are present: if process A produces data and process B prints it, B has to wait until A has produced some data before starting to print. We will examine all three of these issues in some detail in this section. It is also important to mention that two of these issues apply equally well to threads. The first onepassing informationis easy for threads since they share a common address space (threads in different address spaces that need to communicate fall under the heading of communicating processes). However, the other twokeeping out of each other's hair and proper sequencingapply as well to threads. The same problems exist and the same solutions apply. Below we will discuss the problem in the context of processes, but please keep in mind that the same problems and solutions also apply to threads. 2.2.1. Race ConditionsIn some operating systems, processes that are working together may share some common storage that each one can read and write. The shared storage may be in main memory (possibly in a kernel data structure) or it may be a shared file; the location of the shared memory does not change the nature of the communication or the problems that arise. To see how interprocess communication works in practice, let us consider a simple but common example, a print spooler. When a process wants to print a file, it enters the file name in a special spooler directory. Another process, the printer daemon, periodically checks to see if so are any files to be printed, and if so removes their names from the directory. Imagine that our spooler directory has a large number of slots, numbered 0, 1, 2, ..., each one capable of holding a file name. Also imagine that there are two shared variables, out, which points to the next file to be printed, and in, which points to the next free slot in the directory. These two variables might well be kept in a two-word file available to all processes. At a certain instant, slots 0 to 3 are empty (the files have already been printed) and slots 4 to 6 are full (with the names of files to be printed). More or less simultaneously, processes A and B decide they want to queue a file for printing. This situation is shown in Fig. 2-8. Figure 2-8. Two processes want to access shared memory at the same time. In jurisdictions where Murphy's law[
Eventually, process A runs again, starting from the place it left off last time. It looks at next_free_slot, finds a 7 there, and writes its file name in slot 7, erasing the name that process B just put there. Then it computes next_free_slot + 1, which is 8, and sets in to 8. The spooler directory is now internally consistent, so the printer daemon will not notice anything wrong, but process B will never receive any output. User B will hang around the printer room for years, wistfully hoping for output that never comes. Situations like this, where two or more processes are reading or writing some shared data and the final result depends on who runs precisely when, are called race conditions. Debugging programs containing race conditions is no fun at all. The results of most test runs are fine, but once in a blue moon something weird and unexplained happens. 2.2.2. Critical SectionsHow do we avoid race conditions? The key to preventing trouble here and in many other situations involving shared memory, shared files, and shared everything else is to find some way to prohibit more than one process from reading and writing the shared data at the same time. Put in other words, what we need is mutual exclusionsome way of making sure that if one process is using a shared variable or file, the other processes will be excluded from doing the same thing. The difficulty above occurred because process B started using one of the shared variables before process A was finished with it. The choice of appropriate primitive operations for achieving mutual exclusion is a major design issue in any operating system, and a subject that we will now examine in great detail. The problem of avoiding race conditions can also be formulated in an abstract way. Part of the time, a process is busy doing internal computations and other things that do not lead to race conditions. However, sometimes a process may be accessing shared memory or files. That part of the program where the shared memory is accessed is called the critical region or critical section. If we could arrange matters such that no two processes were ever in their critical regions at the same time, we could avoid race conditions. Although this requirement avoids race conditions, this is not sufficient for having parallel processes cooperate correctly and efficiently using shared data. We need four conditions to hold to have a good solution:
The behavior that we want is shown in Fig. 2-9. Here process A enters its critical region at time T1. A little later, at time T2 process B attempts to enter its critical region but fails because another process is already in its critical region and we allow only one at a time. Consequently, B is temporarily suspended until time T3 when A leaves its critical region, allowing B to enter immediately. Eventually B leaves (at T4) and we are back to the original situation with no processes in their critical regions. Figure 2-9. Mutual exclusion using critical regions.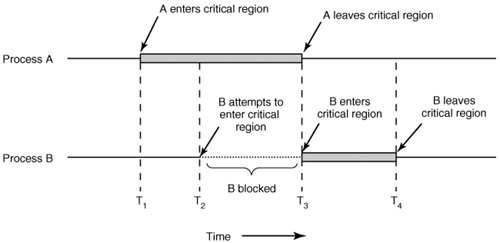 2.2.3. Mutual Exclusion with Busy WaitingIn this section we will examine various proposals for achieving mutual exclusion, so that while one process is busy updating shared memory in its critical region, no other process will enter its critical region and cause trouble. Disabling InterruptsThe simplest solution is to have each process disable all interrupts just after entering its critical region and reenable them just before leaving it. With interrupts disabled, no clock interrupts can occur. The CPU is only switched from process to process as a result of clock or other interrupts, after all, and with interrupts turned off the CPU will not be switched to another process. Thus, once a process has disabled interrupts, it can examine and update the shared memory without fear that any other process will intervene. This approach is generally unattractive because it is unwise to give user processes the power to turn off interrupts. Suppose that one of them did, and then never turned them on again? That could be the end of the system. Furthermore, if the system is a multiprocessor, with two or more CPUs, disabling interrupts affects only the CPU that executed the disable instruction. The other ones will continue running and can access the shared memory. On the other hand, it is frequently convenient for the kernel itself to disable interrupts for a few instructions while it is updating variables or lists. If an interrupt occurred while the list of ready processes, for example, was in an inconsistent state, race conditions could occur. The conclusion is: disabling interrupts is often a useful technique within the operating system itself but is not appropriate as a general mutual exclusion mechanism for user processes. Lock VariablesAs a second attempt, let us look for a software solution. Consider having a single, shared, (lock) variable, initially 0. When a process wants to enter its critical region, it first tests the lock. If the lock is 0, the process sets it to 1 and enters the critical region. If the lock is already 1, the process just waits until it becomes 0. Thus, a 0 means that no process is in its critical region, and a 1 means that some process is in its critical region. Unfortunately, this idea contains exactly the same fatal flaw that we saw in the spooler directory. Suppose that one process reads the lock and sees that it is 0. Before it can set the lock to 1, another process is scheduled, runs, and sets the lock to 1. When the first process runs again, it will also set the lock to 1, and two processes will be in their critical regions at the same time. Now you might think that we could get around this problem by first reading out the lock value, then checking it again just before storing into it, but that really does not help. The race now occurs if the second process modifies the lock just after the first process has finished its second check. Strict AlternationA third approach to the mutual exclusion problem is shown in Fig. 2-10. This program fragment, like most others in this book, is written in C. C was chosen here because real operating systems are commonly written in C (or occasionally C++), but hardly ever in languages like Java. C is powerful, efficient, and predictable, characteristics critical for writing operating systems. Java, for example, is not predictable because it might run out of storage at a critical moment and need to invoke the garbage collector at a most inopportune time. This cannot happen in C because there is no garbage collection in C. A quantitative comparison of C, C++, Java, and four other languages is given by Prechelt (2000). Figure 2-10. A proposed solution to the critical region problem. (a) Process 0. (b) Process 1. In both cases, be sure to note the semicolons terminating the while statements. |
 ] is applicable, the following might well happen. Process
] is applicable, the following might well happen. Process while (TRUE){ while (TRUE) { while(turn != 0) /* loop* /; while(turn != 1) /* loop* /; critical_region(); critical_region(); turn = 1; turn = 0; noncritical_region(); noncritical_region(); } } (a) (b) |
In Fig. 2-10, the integer variable turn, initially 0, keeps track of whose turn it is to enter the critical region and examine or update the shared memory. Initially, process 0 inspects turn, finds it to be 0, and enters its critical region. Process 1 also finds it to be 0 and therefore sits in a tight loop continually testing turn to see when it becomes 1. Continuously testing a variable until some value appears is called busy waiting. It should usually be avoided, since it wastes CPU time. Only when there is a reasonable expectation that the wait will be short is busy waiting used. A lock that uses busy waiting is called a spin lock.
When process 0 leaves the critical region, it sets turn to 1, to allow process 1 to enter its critical region. Suppose that process 1 finishes its critical region quickly, so both processes are in their noncritical regions, with turn set to 0. Now process 0 executes its whole loop quickly, exiting its critical region and setting turn to 1. At this point turn is 1 and both processes are executing in their noncritical regions.
Suddenly, process 0 finishes its noncritical region and goes back to the top of its loop. Unfortunately, it is not permitted to enter its critical region now, because turn is 1 and process 1 is busy with its noncritical region. It hangs in its while loop until process 1 sets turn to 0. Put differently, taking turns is not a good idea when one of the processes is much slower than the other.
This situation violates condition 3 set out above: process 0 is being blocked by a process not in its critical region. Going back to the spooler directory discussed above, if we now associate the critical region with reading and writing the spooler directory, process 0 would not be allowed to print another file because process 1 was doing something else.
In fact, this solution requires that the two processes strictly alternate in entering their critical regions, for example, in spooling files. Neither one would be permitted to spool two in a row. While this algorithm does avoid all races, it is not really a serious candidate as a solution because it violates condition 3.
Peterson's Solution
By combining the idea of taking turns with the idea of lock variables and warning variables, a Dutch mathematician, T. Dekker, was the first one to devise a software solution to the mutual exclusion problem that does not require strict alternation. For a discussion of Dekker's algorithm, see Dijkstra (1965).
In 1981, G.L. Peterson discovered a much simpler way to achieve mutual exclusion, thus rendering Dekker's solution obsolete. Peterson's algorithm is shown in Fig. 2-11. This algorithm consists of two procedures written in ANSI C, which means that function prototypes should be supplied for all the functions defined and used. However, to save space, we will not show the prototypes in this or subsequent examples.
Figure 2-11. Peterson's solution for achieving mutual exclusion.
#define FALSE 0 #define TRUE 1 #define N 2 /* number of processes */ int turn; /* whose turn is it? */ int interested[N]; /* all values initially 0 (FALSE)*/ void enter_region(int process) /* process is 0 or 1 */ { int other; /* number of the other process */ other = 1 - process; /* the opposite of process */ interested[process] = TRUE; /* show that you are interested */ turn = process; /* set flag */ while (turn == process && interested[other] == TRUE) /* null statement */; } void leave_region(int process) /* process: who is leaving */ { interested[process] = FALSE; /* indicate departure from critical region */ } |
Before using the shared variables (i.e., before entering its critical region), each process calls enter_region with its own process number, 0 or 1, as the parameter. This call will cause it to wait, if need be, until it is safe to enter. After it has finished with the shared variables, the process calls leave_region to indicate that it is done and to allow the other process to enter, if it so desires.
Let us see how this solution works. Initially, neither process is in its critical region. Now process 0 calls enter_region. It indicates its interest by setting its array element and sets turn to 0. Since process 1 is not interested, enter_region returns immediately. If process 1 now calls enter_region, it will hang there until interested[0] goes to FALSE, an event that only happens when process 0 calls leave_region to exit the critical region.
Now consider the case that both processes call enter_region almost simultaneously. Both will store their process number in turn. Whichever store is done last is the one that counts; the first one is lost. Suppose that process 1 stores last, so turn is 1. When both processes come to the while statement, process 0 executes it zero times and enters its critical region. Process 1 loops and does not enter its critical region.
The TSL Instruction
Now let us look at a proposal that requires a little help from the hardware. Many computers, especially those designed with multiple processors in mind, have an instruction
TSL RX,LOCK
(Test and Set Lock) that works as follows: it reads the contents of the memory word LOCK into register RX and then stores a nonzero value at the memory address LOCK. The operations of reading the word and storing into it are guaranteed to be indivisibleno other processor can access the memory word until the instruction is finished. The CPU executing the TSL instruction locks the memory bus to prohibit other CPUs from accessing memory until it is done.
To use the TSL instruction, we will use a shared variable, LOCK, to coordinate access to shared memory. When LOCK is 0, any process may set it to 1 using the TSL instruction and then read or write the shared memory. When it is done, the process sets LOCK back to 0 using an ordinary move instruction.
How can this instruction be used to prevent two processes from simultaneously entering their critical regions? The solution is given in Fig. 2-12. There a four-instruction subroutine in a fictitious (but typical) assembly language is shown. The first instruction copies the old value of LOCK to the register and then sets LOCK to 1. Then the old value is compared with 0. If it is nonzero, the lock was already set, so the program just goes back to the beginning and tests it again. Sooner or later it will become 0 (when the process currently in its critical region is done with its critical region), and the subroutine returns, with the lock set. Clearing the lock is simple. The program just stores a 0 in LOCK. No special instructions are needed.
Figure 2-12. Entering and leaving a critical region using the TSL instruction.
enter_region: TSL REGISTER,LOCK |copy LOCK to register and set LOCK to 1 CMP REGISTER,#0 |was LOCK zero? JNE ENTER_REGION |if it was non zero, LOCK was set, so loop RET |return to caller; critical region entered leave_region: MOVE LOCK,#0 |store a 0 in LOCK RET |return to caller |
One solution to the critical region problem is now straightforward. Before entering its critical region, a process calls enter_region, which does busy waiting until the lock is free; then it acquires the lock and returns. After the critical region the process calls leave_region, which stores a 0 in LOCK. As with all solutions based on critical regions, the processes must call enter_region and leave_region at the correct times for the method to work. If a process cheats, the mutual exclusion will fail.
2.2.4. Sleep and Wakeup
Both Peterson's solution and the solution using TSL are correct, but both have the defect of requiring busy waiting. In essence, what these solutions do is this: when a process wants to enter its critical region, it checks to see if the entry is allowed. If it is not, the process just sits in a tight loop waiting until it is.
Not only does this approach waste CPU time, but it can also have unexpected effects. Consider a computer with two processes, H, with high priority and L, with low priority, which share a critical region. The scheduling rules are such that H is run whenever it is in ready state. At a certain moment, with L in its critical region, H becomes ready to run (e.g., an I/O operation completes). H now begins busy waiting, but since L is never scheduled while H is running, L never gets the chance to leave its critical region, so H loops forever. This situation is sometimes referred to as the priority inversion problem.
Now let us look at some interprocess communication primitives that block instead of wasting CPU time when they are not allowed to enter their critical regions. One of the simplest is the pair sleep and wakeup. sleep is a system call that causes the caller to block, that is, be suspended until another process wakes it up. The wakeup call has one parameter, the process to be awakened. Alternatively, both sleep and wakeup each have one parameter, a memory address used to match up sleeps with wakeups.
The Producer-Consumer Problem
As an example of how these primitives can be used in practice, let us consider the producer-consumer problem (also known as the bounded buffer problem). Two processes share a common, fixed-size buffer. One of them, the producer, puts information into the buffer, and the other one, the consumer, takes it out. (It is also possible to generalize the problem to have m producers and n consumers, but we will only consider the case of one producer and one consumer because this assumption simplifies the solutions).
Trouble arises when the producer wants to put a new item in the buffer, but it is already full. The solution is for the producer to go to sleep, to be awakened when the consumer has removed one or more items. Similarly, if the consumer wants to remove an item from the buffer and sees that the buffer is empty, it goes to sleep until the producer puts something in the buffer and wakes it up.
This approach sounds simple enough, but it leads to the same kinds of race conditions we saw earlier with the spooler directory. To keep track of the number of items in the buffer, we will need a variable, count. If the maximum number of items the buffer can hold is N, the producer's code will first test to see if count is N. If it is, the producer will go to sleep; if it is not, the producer will add an item and increment count.
The consumer's code is similar: first test count to see if it is 0. If it is, go to sleep; if it is nonzero, remove an item and decrement the counter. Each of the processes also tests to see if the other should be sleeping, and if not, wakes it up. The code for both producer and consumer is shown in Fig. 2-13.
Figure 2-13. The producer-consumer problem with a fatal race condition.
| [View full width] #define N 100 /* number of slots in the buffer */ int count = 0; /* number of items in the buffer */ void producer(void) { int item; while (TRUE){ /* repeat forever */ item = produce_item(); /* generate next item */ if (count == N) sleep(); /* if buffer is full, go to sleep */ insert_item(item); /* put item in buffer */ count = count + 1; /* increment count of items in buffer */ if (count == 1) wakeup(consumer); /* was buffer empty? */ } } void consumer(void) { int item; while (TRUE){ /* repeat forever */ if (count == 0) sleep(); /* if buffer is empty, got to sleep */ item = remove_item(); /* take item out of buffer */ count = count 1; /* decrement count of items in |
To express system calls such as sleep and wakeup in C, we will show them as calls to library routines. They are not part of the standard C library but presumably would be available on any system that actually had these system calls. The procedures enter_item and remove_item, which are not shown, handle the bookkeeping of putting items into the buffer and taking items out of the buffer.
Now let us get back to the race condition. It can occur because access to count is unconstrained. The following situation could possibly occur. The buffer is empty and the consumer has just read count to see if it is 0. At that instant, the scheduler decides to stop running the consumer temporarily and start running the producer. The producer enters an item in the buffer, increments count, and notices that it is now 1. Reasoning that count was just 0, and thus the consumer must be sleeping, the producer calls wakeup to wake the consumer up.
Unfortunately, the consumer is not yet logically asleep, so the wakeup signal is lost. When the consumer next runs, it will test the value of count it previously read, find it to be 0, and go to sleep. Sooner or later the producer will fill up the buffer and also go to sleep. Both will sleep forever.
The essence of the problem here is that a wakeup sent to a process that is not (yet) sleeping is lost. If it were not lost, everything would work. A quick fix is to modify the rules to add a wakeup waiting bit to the picture. When a wakeup is sent to a process that is still awake, this bit is set. Later, when the process tries to go to sleep, if the wakeup waiting bit is on, it will be turned off, but the process will stay awake. The wakeup waiting bit is a piggy bank for wakeup signals.
While the wakeup waiting bit saves the day in this simple example, it is easy to construct examples with three or more processes in which one wakeup waiting bit is insufficient. We could make another patch, and add a second wakeup waiting bit, or maybe 8 or 32 of them, but in principle the problem is still there.
2.2.5. Semaphores
This was the situation until E. W. Dijkstra (1965) suggested using an integer variable to count the number of wakeups saved for future use. In his proposal, a new variable type, called a semaphore, was introduced. A semaphore could have the value 0, indicating that no wakeups were saved, or some positive value if one or more wakeups were pending.
Dijkstra proposed having two operations, down and up (which are generalizations of sleep and wakeup, respectively). The down operation on a semaphore checks to see if the value is greater than 0. If so, it decrements the value (i.e., uses up one stored wakeup) and just continues. If the value is 0, the process is put to sleep without completing the down for the moment. Checking the value, changing it, and possibly going to sleep is all done as a single, indivisible, atomic action. It is guaranteed that once a semaphore operation has started, no other process can access the semaphore until the operation has completed or blocked. This atomicity is absolutely essential to solving synchronization problems and avoiding race conditions.
The up operation increments the value of the semaphore addressed. If one or more processes were sleeping on that semaphore, unable to complete an earlier down operation, one of them is chosen by the system (e.g., at random) and is allowed to complete its down. Thus, after an up on a semaphore with processes sleeping on it, the semaphore will still be 0, but there will be one fewer process sleeping on it. The operation of incrementing the semaphore and waking up one process is also indivisible. No process ever blocks doing an up, just as no process ever blocks doing a wakeup in the earlier model.
As an aside, in Dijkstra's original paper, he used the names p and v instead of down and up, respectively, but since these have no mnemonic significance to people who do not speak Dutch (and only marginal significance to those who do), we will use the terms down and up instead. These were first introduced in Algol 68.
Solving the Producer-Consumer Problem using Semaphores
Semaphores solve the lost-wakeup problem, as shown in Fig. 2-14. It is essential that they be implemented in an indivisible way. The normal way is to implement up and down as system calls, with the operating system briefly disabling all interrupts while it is testing the semaphore, updating it, and putting the process to sleep, if necessary. As all of these actions take only a few instructions, no harm is done in disabling interrupts. If multiple CPUs are being used, each semaphore should be protected by a lock variable, with the TSL instruction used to make sure that only one CPU at a time examines the semaphore. Be sure you understand that using TSL to prevent several CPUs from accessing the semaphore at the same time is quite different from busy waiting by the producer or consumer waiting for the other to empty or fill the buffer. The semaphore operation will only take a few microseconds, whereas the producer or consumer might take arbitrarily long.
Figure 2-14. The producer-consumer problem using semaphores. (This item is displayed on page 80 in the print version)
#define N 100 /* number of slots in the buffer */ typedef int semaphore; /* semaphores are a special kind of int */ semaphore mutex = 1; /* controls access to critical region */ semaphore empty = N; /* counts empty buffer slots */ semaphore full = 0; /* counts full buffer slots */ void producer(void) { int item; while (TRUE){ /* TRUE is the constant 1 */ item = produce_item(); /* generate something to put in buffer */ down(&empty); /* decrement empty count */ down(&mutex); /* enter critical region */ insert_item(item); /* put new item in buffer */ up(&mutex); /* leave critical region */ up(&full); /* increment count of full slots */ } } void consumer(void) { int item; while (TRUE){ /* infinite loop */ down(&full); /* decrement full count */ down(&mutex); /* enter critical region */ item = remove_item(); /* take item from buffer */ up(&mutex); /* leave critical region */ up(&empty); /* increment count of empty slots */ consume_item(item); /* do something with the item */ } } |
This solution uses three semaphores: one called full for counting the number of slots that are full, one called empty for counting the number of slots that are empty, and one called mutex to make sure the producer and consumer do not access the buffer at the same time. Full is initially 0, empty is initially equal to the number of slots in the buffer, and mutex is initially 1. Semaphores that are initialized to 1 and used by two or more processes to ensure that only one of them can enter its critical region at the same time are called binary semaphores. If each process does a down just before entering its critical region and an up just after leaving it, mutual exclusion is guaranteed.
Now that we have a good interprocess communication primitive at our disposal, let us go back and look at the interrupt sequence of Fig. 2-5 again. In a system-using semaphores, the natural way to hide interrupts is to have a semaphore, initially set to 0, associated with each I/O device. Just after starting an I/O device, the managing process does a down on the associated semaphore, thus blocking immediately. When the interrupt comes in, the interrupt handler then does an up on the associated semaphore, which makes the relevant process ready to run again. In this model, step 6 in Fig. 2-5 consists of doing an up on the device's semaphore, so that in step 7 the scheduler will be able to run the device manager. Of course, if several processes are now ready, the scheduler may choose to run an even more important process next. We will look at how scheduling is done later in this chapter.
In the example of Fig. 2-14, we have actually used semaphores in two different ways. This difference is important enough to make explicit. The mutex semaphore is used for mutual exclusion. It is designed to guarantee that only one process at a time will be reading or writing the buffer and the associated variables. This mutual exclusion is required to prevent chaos. We will study mutual exclusion and how to achieve it more in the next section.
The other use of semaphores is for synchronization. The full and empty semaphores are needed to guarantee that certain event sequences do or do not occur. In this case, they ensure that the producer stops running when the buffer is full, and the consumer stops running when it is empty. This use is different from mutual exclusion.
2.2.6. Mutexes
When the semaphore's ability to count is not needed, a simplified version of the semaphore, called a mutex, is sometimes used. Mutexes are good only for managing mutual exclusion to some shared resource or piece of code. They are easy and efficient to implement, which makes them especially useful in thread packages that are implemented entirely in user space.
A mutex is a variable that can be in one of two states: unlocked or locked. Consequently, only 1 bit is required to represent it, but in practice an integer often is used, with 0 meaning unlocked and all other values meaning locked. Two procedures are used with mutexes. When a process (or thread) needs access to a critical region, it calls mutex_lock. If the mutex is currently unlocked (meaning that the critical region is available), the call succeeds and the calling thread is free to enter the critical region.
On the other hand, if the mutex is already locked, the caller is blocked until the process in the critical region is finished and calls mutex_unlock. If multiple processes are blocked on the mutex, one of them is chosen at random and allowed to acquire the lock.
2.2.7. Monitors
With semaphores interprocess communication looks easy, right? Forget it. Look closely at the order of the downs before entering or removing items from the buffer in Fig. 2-14. Suppose that the two downs in the producer's code were reversed in order, so mutex was decremented before empty instead of after it. If the buffer were completely full, the producer would block, with mutex set to 0. Consequently, the next time the consumer tried to access the buffer, it would do a down on mutex, now 0, and block too. Both processes would stay blocked forever and no more work would ever be done. This unfortunate situation is called a deadlock. We will study deadlocks in detail in Chap. 3.
This problem is pointed out to show how careful you must be when using semaphores. One subtle error and everything comes to a grinding halt. It is like programming in assembly language, only worse, because the errors are race conditions, deadlocks, and other forms of unpredictable and irreproducible behavior.
To make it easier to write correct programs, Brinch Hansen (1973) and Hoare (1974) proposed a higher level synchronization primitive called a monitor. Their proposals differed slightly, as described below. A monitor is a collection of procedures, variables, and data structures that are all grouped together in a special kind of module or package. Processes may call the procedures in a monitor whenever they want to, but they cannot directly access the monitor's internal data structures from procedures declared outside the monitor. This rule, which is common in modern object-oriented languages such as Java, was relatively unusual for its time, although objects can be traced back to Simula 67. Figure 2-15 illustrates a monitor written in an imaginary language, Pidgin Pascal.
Figure 2-15. A monitor.
monitor example integer i; condition c; procedure producer (x); . . . end; procedure consumer (x); . . . end; end monitor; |
Monitors have a key property that makes them useful for achieving mutual exclusion: only one process can be active in a monitor at any instant. Monitors are a programming language construct, so the compiler knows they are special and can handle calls to monitor procedures differently from other procedure calls. Typically, when a process calls a monitor procedure, the first few instructions of the procedure will check to see if any other process is currently active within the monitor. If so, the calling process will be suspended until the other process has left the monitor. If no other process is using the monitor, the calling process may enter.
It is up to the compiler to implement the mutual exclusion on monitor entries, but a common way is to use a mutex or binary semaphore. Because the compiler, not the programmer, arranges for the mutual exclusion, it is much less likely that something will go wrong. In any event, the person writing the monitor does not have to be aware of how the compiler arranges for mutual exclusion. It is sufficient to know that by turning all the critical regions into monitor procedures, no two processes will ever execute their critical regions at the same time.
Although monitors provide an easy way to achieve mutual exclusion, as we have seen above, that is not enough. We also need a way for processes to block when they cannot proceed. In the producer-consumer problem, it is easy enough to put all the tests for buffer-full and buffer-empty in monitor procedures, but how should the producer block when it finds the buffer full?
The solution lies in the introduction of condition variables, along with two operations on them, wait and signal. When a monitor procedure discovers that it cannot continue (e.g., the producer finds the buffer full), it does a wait on some condition variable, say, full. This action causes the calling process to block. It also allows another process that had been previously prohibited from entering the monitor to enter now.
This other process, for example, the consumer, can wake up its sleeping partner-by doing a signal on the condition variable that its partner is waiting on. To avoid having two active processes in the monitor at the same time, we need a rule telling what happens after a signal. Hoare proposed letting the newly awakened process run, suspending the other one. Brinch Hansen proposed finessing the problem by requiring that a process doing a signal must exit the monitor immediately. In other words, a signal statement may appear only as the final statement in a monitor procedure. We will use Brinch Hansen's proposal because it is conceptually simpler and is also easier to implement. If a signal is done on a condition variable on which several processes are waiting, only one of them, determined by the system scheduler, is revived.
There is also a third solution, not proposed by either Hoare or Brinch Hansen. This is to let the signaler continue to run and allow the waiting process to start running only after the signaler has exited the monitor.
Condition variables are not counters. They do not accumulate signals for later use the way semaphores do. Thus if a condition variable is signaled with no one waiting on it, the signal is lost. In other words, the wait must come before the signal. This rule makes the implementation much simpler. In practice it is not a problem because it is easy to keep track of the state of each process with variables, if need be. A process that might otherwise do a signal can see that this operation is not necessary by looking at the variables.
A skeleton of the producer-consumer problem with monitors is given in Fig. 2-16 in Pidgin Pascal. The advantage of using Pidgin Pascal here is that it is pure and simple and follows the Hoare/Brinch Hansen model exactly.
Figure 2-16. An outline of the producer-consumer problem with monitors. Only one monitor procedure at a time is active. The buffer has N slots. (This item is displayed on page 84 in the print version)
monitor ProducerConsumer condition full, empty; integer count; procedure insert(item: integer); begin if count = N then wait(full); insert_item(item); count := count + 1; if count = 1 then signal(empty) end; function remove: integer; begin if count = 0 then wait(empty); remove = remove_item; count := count 1; if count = N 1 then signal(full) end; count := 0; end monitor; procedure producer; begin while true do begin item = produce_item; ProducerConsumer.insert(item) end end; procedure consumer; begin while true do begin item = ProducerConsumer.remove; consume_item(item) end end; |
You may be thinking that the operations wait and signal look similar to sleep and wakeup, which we saw earlier had fatal race conditions. They are very similar, but with one crucial difference: sleep and wakeup failed because while one process was trying to go to sleep, the other one was trying to wake it up. With monitors, that cannot happen. The automatic mutual exclusion on monitor procedures guarantees that if, say, the producer inside a monitor procedure discovers that the buffer is full, it will be able to complete the wait operation without having to worry about the possibility that the scheduler may switch to the consumer just before the wait completes. The consumer will not even be let into the monitor at all until the wait is finished and the producer is marked as no longer runnable.
Although Pidgin Pascal is an imaginary language, some real programming languages also support monitors, although not always in the form designed by Hoare and Brinch Hansen. One such language is Java. Java is an object-oriented language that supports user-level threads and also allows methods (procedures) to be grouped together into classes. By adding the keyword synchronized to a method declaration, Java guarantees that once any thread has started executing that method, no other thread will be allowed to start executing any other synchronized method in that class.
Synchronized methods in Java differ from classical monitors in an essential way: Java does not have condition variables. Instead, it offers two procedures, wait and notify that are the equivalent of sleep and wakeup except that when they are used inside synchronized methods, they are not subject to race conditions.
By making the mutual exclusion of critical regions automatic, monitors make parallel programming much less error-prone than with semaphores. Still, they too have some drawbacks. It is not for nothing that Fig. 2-16 is written in Pidgin Pascal rather than in C, as are the other examples in this book. As we said earlier, monitors are a programming language concept. The compiler must recognize them and arrange for the mutual exclusion somehow. C, Pascal, and most other languages do not have monitors, so it is unreasonable to expect their compilers to enforce any mutual exclusion rules. In fact, how could the compiler even know which procedures were in monitors and which were not?
These same languages do not have semaphores either, but adding semaphores is easy: all you need to do is add two short assembly code routines to the library to issue the up and down system calls. The compilers do not even have to know that they exist. Of course, the operating systems have to know about the semaphores, but at least if you have a semaphore-based operating system, you can still write the user programs for it in C or C++ (or even FORTRAN if you are masochistic enough). With monitors, you need a language that has them built in.
Another problem with monitors, and also with semaphores, is that they were designed for solving the mutual exclusion problem on one or more CPUs that all have access to a common memory. By putting the semaphores in the shared memory and protecting them with TSL instructions, we can avoid races. When we go to a distributed system consisting of multiple CPUs, each with its own private memory, connected by a local area network, these primitives become inapplicable. The conclusion is that semaphores are too low level and monitors are not usable except in a few programming languages. Also, none of the primitives provide for information exchange between machines. Something else is needed.
2.2.8. Message Passing
That something else is message passing. This method of interprocess communication uses two primitives, send and receive, which, like semaphores and unlike monitors, are system calls rather than language constructs. As such, they can easily be put into library procedures, such as
send(destination, &message);
and
receive(source, &message);
The former call sends a message to a given destination and the latter one receives a message from a given source (or from ANY, if the receiver does not care). If no message is available, the receiver could block until one arrives. Alternatively, it could return immediately with an error code.
Design Issues for Message Passing Systems
Message passing systems have many challenging problems and design issues that do not arise with semaphores or monitors, especially if the communicating processes are on different machines connected by a network. For example, messages can be lost by the network. To guard against lost messages, the sender and receiver can agree that as soon as a message has been received, the receiver will send back a special acknowledgement message. If the sender has not received the acknowledgement within a certain time interval, it retransmits the message.
Now consider what happens if the message itself is received correctly, but the acknowledgement is lost. The sender will retransmit the message, so the receiver will get it twice. It is essential that the receiver can distinguish a new message from the retransmission of an old one. Usually, this problem is solved by putting consecutive sequence numbers in each original message. If the receiver gets a message bearing the same sequence number as the previous message, it knows that the message is a duplicate that can be ignored.
Message systems also have to deal with the question of how processes are named, so that the process specified in a send or receive call is unambiguous. Authentication is also an issue in message systems: how can the client tell that he is communicating with the real file server, and not with an imposter?
At the other end of the spectrum, there are also design issues that are important when the sender and receiver are on the same machine. One of these is performance. Copying messages from one process to another is always slower than doing a semaphore operation or entering a monitor. Much work has gone into making message passing efficient. Cheriton (1984), for example, has suggested limiting message size to what will fit in the machine's registers, and then doing message passing using the registers.
The Producer-Consumer Problem with Message Passing
Now let us see how the producer-consumer problem can be solved with message passing and no shared memory. A solution is given in Fig. 2-17. We assume that all messages are the same size and that messages sent but not yet received are buffered automatically by the operating system. In this solution, a total of N messages is used, analogous to the N slots in a shared memory buffer. The consumer starts out by sending N empty messages to the producer. Whenever the producer has an item to give to the consumer, it takes an empty message and sends back a full one. In this way, the total number of messages in the system remains constant in time, so they can be stored in a given amount of memory known in advance.
Figure 2-17. The producer-consumer problem with N messages.
#define N 100 /* number of slots in the buffer */ void producer(void) { int item; message m; /* message buffer */ while (TRUE) { item = produce_item(); /* generate something to put in buffer */ receive(consumer, &m); /* wait for an empty to arrive */ build_message(&m, item); /* construct a message to send */ send(consumer, &m); /* send item to consumer */ } } void consumer(void) { int item, i; message m; for (i = 0; i < N; i++) send(producer, &m); /* send N empties */ while (TRUE) { receive(producer, &m); /* get message containing item */ item = extract_item(&m); /* extract item from message */ send(producer, &m); /* send back empty reply */ consume_item(item); /* do some1thing with the item */ } } |
If the producer works faster than the consumer, all the messages will end up full, waiting for the consumer; the producer will be blocked, waiting for an empty to come back. If the consumer works faster, then the reverse happens: all the messages will be empties waiting for the producer to fill them up; the consumer will be blocked, waiting for a full message.
Many variants are possible with message passing. For starters, let us look at how messages are addressed. One way is to assign each process a unique address and have messages be addressed to processes. A different way is to invent a new data structure, called a mailbox. A mailbox is a place to buffer a certain number of messages, typically specified when the mailbox is created. When mailboxes are used, the address parameters in the send and receive calls are mailboxes, not processes. When a process tries to send to a mailbox that is full, it is suspended until a message is removed from that mailbox, making room for a new one.
For the producer-consumer problem, both the producer and consumer would create mailboxes large enough to hold N messages. The producer would send messages containing data to the consumer's mailbox, and the consumer would send empty messages to the producer's mailbox. When mailboxes are used, the buffering mechanism is clear: the destination mailbox holds messages that have been sent to the destination process but have not yet been accepted.
The other extreme from having mailboxes is to eliminate all buffering. When this approach is followed, if the send is done before the receive, the sending process is blocked until the receive happens, at which time the message can be copied directly from the sender to the receiver, with no intermediate buffering. Similarly, if the receive is done first, the receiver is blocked until a send happens. This strategy is often known as a rendezvous. It is easier to implement than a buffered message scheme but is less flexible since the sender and receiver are forced to run in lockstep.
The processes that make up the MINIX 3 operating system itself use the rendezvous method with fixed size messages for communication among themselves. User processes also use this method to communicate with operating system components, although a programmer does not see this, since library routines mediate systems calls. Interprocess communication between user processes in MINIX 3 (and UNIX) is via pipes, which are effectively mailboxes. The only real difference between a message system with mailboxes and the pipe mechanism is that pipes do not preserve message boundaries. In other words, if one process writes 10 messages of 100 bytes to a pipe and another process reads 1000 bytes from that pipe, the reader will get all 10 messages at once. With a true message system, each read should return only one message. Of course, if the processes agree always to read and write fixed-size messages from the pipe, or to end each message with a special character (e.g., linefeed), no problems arise.
Message passing is commonly used in parallel programming systems. One well-known message-passing system, for example, is MPI (Message-Passing Interface). It is widely used for scientific computing. For more information about it, see for example Gropp et al. (1994) and Snir et al. (1996).
EAN: 2147483647
Pages: 102