133.
| [Cover] [Contents] [Index] |
Page 217
white-noise process referred to as the driving process, and θr, acts as an exponent weighting factor for neighbourhood r. For instance, pixel (i, j) and its first and second-order neighbourhood is illustrated in Figure 5.17a. The concept of neighbourhood is explained further in Chapter 6. If we define the neighbourhood set N as {(−1, −1), (1, 0), (0, 1)}, then only these three particular neighbours contribute to the central pixel (i, j), as illustrated in Figure 5.17b. According to Equation (5.44) the central pixel value x(i, j) can be modelled as:
 |
(5.45) |
The random field x(i, j) is said to obey a log-normal MAR model if y(i, j) =ln[x (i, j)] obeys the following Gaussian autoregressive random field model with u(i, j)=ln[v(i, j)]:
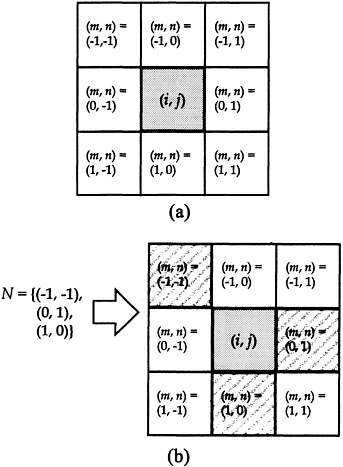
Figure 5.17 (a) First and second-order neighbourhood of central pixel (i, j). (b) Only three neighbours contribute to the pixel value x(i, j). See text for explanation.
| [Cover] [Contents] [Index] |
EAN: 2147483647
Pages: 354