121.
| [Cover] [Contents] [Index] |
Page 206
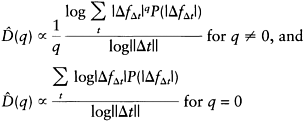
developed by Voss (1986), Sarkar and Chaudhuri (1994) and Clarke (1986), respectively, were employed as a basis for estimating the function D(q). From Equation (5.4), the estimated value of D(q) is given by:
 |
(5.30) |
Note that  (q) in Equation (5.28) is equal to D(q+1) in Equation (5.25). The purpose of this manipulation is to avoid estimation bias in the case of q=1 and 0. The numerator of the first term in Equation (5.27) is equivalent to calculating the q moment of
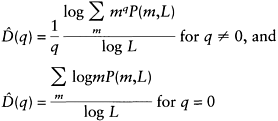
(q) in Equation (5.28) is equal to D(q+1) in Equation (5.25). The purpose of this manipulation is to avoid estimation bias in the case of q=1 and 0. The numerator of the first term in Equation (5.27) is equivalent to calculating the q moment of  in the case of discrete variables, and P denotes the probability for , which can be obtained using a histogram technique. Based on Keller et al. (1989) an estimate of D(q) is obtained from:
in the case of discrete variables, and P denotes the probability for , which can be obtained using a histogram technique. Based on Keller et al. (1989) an estimate of D(q) is obtained from:
 |
(5.31) |
Again, the term (q) in this expression is equal to the term—D(q+1) in Equation (5.28) which was suggested by Fioravanti (1994) for the purpose of image segmentation.
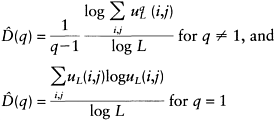
If the method based on an extension of Sarkar and Chaudhuri’s (1994) results is used, then the estimate of D(q) is obtained from:
 |
(5.32) |
where uL(i, j)=[nL(i, j)/NL], nL(i, j) and NL are defined in Equation (5.13).
Finally, using Clarke’s (1986) approach as a basis, one obtains:
| [Cover] [Contents] [Index] |
EAN: 2147483647
Pages: 354