8.3 Configuring SDI Links
| | ||
| | ||
| | ||
8.3 Configuring SDI Links
The viability of an SDI link is governed primarily by data rate and proposed distance. It is quite easy to establish what grade of cable will be required from the tables in Chapter 7. As can be seen from Figure 8.4, the data integrity deteriorates rapidly beyond a critical cable length. The sudden upswing in bit error rate is known as the ˜crash knee' and for reliability only operation to the left of the knee is possible. Figure 8.4 shows the situation for SD. For HD, a similar trend will be observed , but the cable length values should be divided by approximately two.
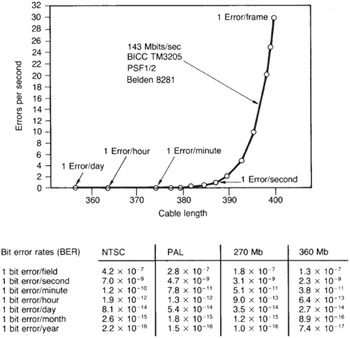
Figure 8.4: Because of the multiplicative effect of the large number of factors causing signal degradation the error rate increases steeply after a certain cable length. This sudden onset of errors is referred to as the 'crash knee'.
The existence of the crash knee makes it obvious that quoted cable length figures should not be stretched . As SDI is a point-to-point interface all receivers are equipped with an internal terminator. Thus there is no such thing as passive loop-through and use of a coaxial T-piece for monitoring is ruled out. Active loop-through means that, in the case of a power failure, the loop-through signal will fail. If it is required to drive multiple destinations, a digital distribution amplifier will be needed.
If the distance required is excessive even for the best grade of cable then a repeater will be required. Unlike an analog repeater, a properly engineered digital repeater causes no generation loss and minimal delay. Figure 8.5 shows a typical reclocking repeater. The repeater is not interested in the meaning of the data and need not descramble or deserialize the data stream. It is only necessary to reclock with a phase-locked loop to reject jitter and slice to reject noise. The resultant clean logic level signal can then be supplied to a further SDI cable driver.
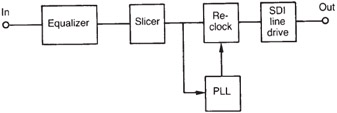
Figure 8.5: In a reclocking repeater the input signal is equalized, sliced and reclocked with a phase-locked loop to recover a clean binary signal which then passes to an SDI line driver.
Such a simple reclocking repeater is of limited use in an EDH system as there is no ability to distinguish errors occurring before or after the repeater. If this is important an EDH supporting repeater will be necessary. By definition such a device must descramble and deserialize the data stream in order to make the error-detecting checks on the incoming data. As a result it will cause a greater signal delay than a simple reclocking repeater.
| | ||
| | ||
| | ||
EAN: 2147483647
Pages: 120