166.
| [Cover] [Contents] [Index] |
Page 247
on the domain [+∞>(wr−wr′)≥0]. The first derivative g′(wr–wr′) is generally expressed as:
 |
(6.24) |
where h(wr−wr′) is called the interaction function. The rationale for including this expression in Equation (6.24) is explained in Section 6.3. The conditions in Equations (6.22) and (6.23) guarantee that if a difference between wr and wr, does occur, then the function g(wr−wr′) will apply a penalty (in the term of higher energy) to reduce the probability of occurrence of this difference, and the penalty is related to the magnitude of |(wr −wr')| as shown below. A simple function for satisfying the above conditions can be a quadratic function such as:
 |
(6.25) |
which will penalise every discontinuity. Consequently, Equation (6.25) is likely to generate a surface which is continuous everywhere. Since we are only interested in restoring piecewise continuity, Equation (6.25) can be refined, following Blake and Zisserman (1987), to give:
 |
(6.26) |
where λ is a truncation point (described below). Equation (6.26) shows that if the difference wr−wr′ is sufficiently large then it is likely to indicate a potential edge. In this case, we would like to pay out lower energy λ instead of (wr−wr′)2 in order to offer a higher probability for its existence. Figure 6.9 illustrates such a truncation function.
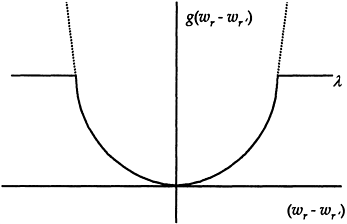
Figure 6.9 A function g(wr−wr) truncated by λ.
| [Cover] [Contents] [Index] |
EAN: 2147483647
Pages: 354