156.
| [Cover] [Contents] [Index] |
Page 238
only contains two labels, L={1, −1}, and if the potential function V1(wr) =α·wr, V2(wr,wr′)=β·wr·Wr′, then the corresponding expression for the energy function U(w) becomes:
 |
(6.11) |
where α and β are the potential parameters. Equation (6.11) is called an autologistic model (Besag, 1974) and has been used for texture modelling by Cross and Jain (1983). If the distribution of P(w) is Gibbsian (i.e. can be modelled by Equation (6.1)), then the conditional probability P(wr|wNr) for pixel r in an autologistic model is calculated as:
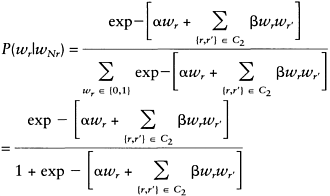 |
(6.12) |
When the neighbourhood system defined in Equation (6.12) is reduced to a first-order system (i.e. using nearest neighbours as shown in Figure 6.1a), the autologistic model is called the Ising model, after Ising (1925), and is the best-known lattice system.
The autologistic model can be further generalised into the multilevel logistic (MLL) model. The MLL model is also called a generalised Ising model (Geman and Geman, 1984) and it possesses the following properties:
1 The number of labels in the label set L must be greater than 2
2 For a single clique C1, the potential function V1 (wr) is label-dependent, and is defined as V1 (wr)=αk if wr=label k, k  L
L
3 For cliques containing more than one site (i.e. C2, C3,…) the potential function is defined as
Vc(w)=−ζc if all sites in clique c have the same label,
Vc(w)=ζc 0 otherwise.
where ζc (>0) is a real number called the potential parameter. In general,
| [Cover] [Contents] [Index] |
EAN: 2147483647
Pages: 354