153.
| [Cover] [Contents] [Index] |
Page 235
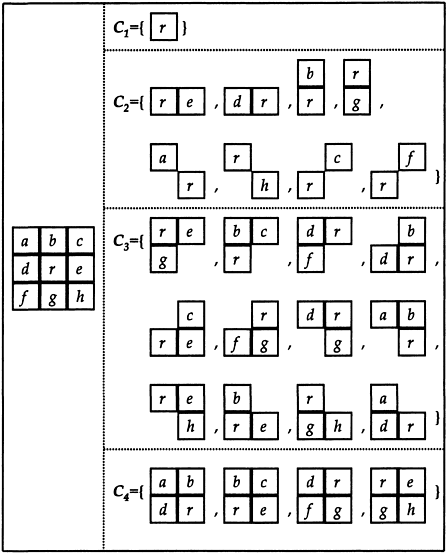
Figure 6.3 The cliques C1, C2, C3 and C4 derived from a 3×3 window centred on the pixel r of interest.
that a unique GRF exists for every MRF as long as the GRF is defined in terms of cliques on a neighbourhood system. Several authors present the proof of this theorem (Besag, 1974; Moussouris, 1974; Kindermann and Snell, 1980). A proof that the GRF is a MRF is given below.
Let P(w) be a Gibbs distribution on the set of sites (image pixels) S with respect to the neighbourhood system N. Consider the conditional probability defined by:
 |
(6.5) |
| [Cover] [Contents] [Index] |
Classification Methods for Remotely Sensed Data, Second Edition
ISBN: 1420090720
EAN: 2147483647
EAN: 2147483647
Year: 2001
Pages: 354
Pages: 354
Authors: Paul Mather, Brandt Tso