Section 1.5. Operating System Structure
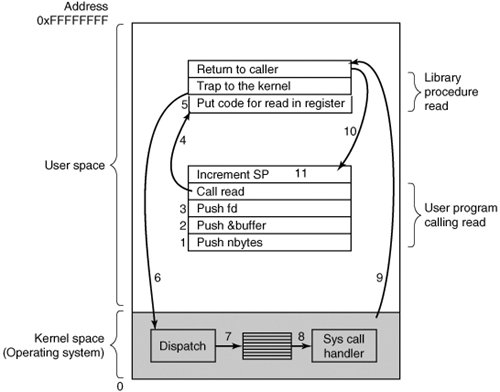
1.5. Operating System StructureNow that we have seen what operating systems look like on the outside (i.e, the programmer's interface), it is time to take a look inside. In the following sections, we will examine five different structures that have been tried, in order to get some idea of the spectrum of possibilities. These are by no means exhaustive, but they give an idea of some designs that have been tried in practice. The five designs are monolithic systems, layered systems, virtual machines, exokernels, and client-server systems. 1.5.1. Monolithic SystemsBy far the most common organization, this approach might well be subtitled "The Big Mess." The structure is that there is no structure. The operating system is written as a collection of procedures, each of which can call any of the other ones whenever it needs to. When this technique is used, each procedure in the system has a well-defined interface in terms of parameters and results, and each one is free to call any other one, if the latter provides some useful computation that the former needs. To construct the actual object program of the operating system when this approach is used, one first compiles all the individual procedures, or files containing the procedures, and then binds them all together into a single object file using the system linker. In terms of information hiding, there is essentially noneevery procedure is visible to every other procedure (as opposed to a structure containing modules or packages, in which much of the information is hidden away inside modules, and only the officially designated entry points can be called from outside the module). Even in monolithic systems, however, it is possible to have at least a little structure. The services (system calls) provided by the operating system are requested by putting the parameters in well-defined places, such as in registers or on the stack, and then executing a special trap instruction known as a kernel call or supervisor call. This instruction switches the machine from user mode to kernel mode and transfers control to the operating system. (Most CPUs have two modes: kernel mode, for the operating system, in which all instructions are allowed; and user mode, for user programs, in which I/O and certain other instructions are not allowed.) This is a good time to look at how system calls are performed. Recall that the read call is used like this: count = read(fd, buffer, nbytes); In preparation for calling the read library procedure, which actually makes the read system call, the calling program first pushes the parameters onto the stack, as shown in steps 13 in Fig. 1-16. C and C++ compilers push the parameters onto the stack in reverse order for historical reasons (having to do with making the first parameter to printf, the format string, appear on top of the stack). The first and third parameters are called by value, but the second parameter is passed by reference, meaning that the address of the buffer (indicated by &) is passed, not the contents of the buffer. Then comes the actual call to the library procedure (step 4). This instruction is the normal procedure call instruction used to call all procedures. Figure 1-16. The 11 steps in making the system call read(fd, buffer, nbytes). |
Layer | Function |
|---|---|
5 | The operator |
4 | User programs |
3 | Input/output management |
2 | Operator-process communication |
1 | Memory and drum management |
0 | Processor allocation and multiprogramming |
Layer 1 did the memory management. It allocated space for processes in main memory and on a 512K word drum used for holding parts of processes (pages) for which there was no room in main memory. Above layer 1, processes did not have to worry about whether they were in memory or on the drum; the layer 1 software took care of making sure pages were brought into memory whenever they were needed.
Layer 2 handled communication between each process and the operator console. Above this layer each process effectively had its own operator console. Layer 3 took care of managing the I/O devices and buffering the information streams to and from them. Above layer 3 each process could deal with abstract I/O devices with nice properties, instead of real devices with many peculiarities. Layer 4 was where the user programs were found. They did not have to worry about process, memory, console, or I/O management. The system operator process was located in layer 5.
A further generalization of the layering concept was present in the MULTICS system. Instead of layers, MULTICS was organized as a series of concentric rings, with the inner ones being more privileged than the outer ones. When a procedure in an outer ring wanted to call a procedure in an inner ring, it had to make the equivalent of a system call, that is, a TRAP instruction whose parameters were carefully checked for validity before allowing the call to proceed. Although the entire operating system was part of the address space of each user process in MULTICS, the hardware made it possible to designate individual procedures (memory segments, actually) as protected against reading, writing, or executing.
Whereas the THE layering scheme was really only a design aid, because all the parts of the system were ultimately linked together into a single object program, in MULTICS, the ring mechanism was very much present at run time and enforced by the hardware. The advantage of the ring mechanism is that it can easily be extended to structure user subsystems. For example, a professor could write a program to test and grade student programs and run this program in ring n, with the student programs running in ring n + 1 so that they could not change their grades. The Pentium hardware supports the MULTICS ring structure, but no major operating system uses it at present.
1.5.3. Virtual Machines
The initial releases of OS/360 were strictly batch systems. Nevertheless, many 360 users wanted to have timesharing, so various groups, both inside and outside IBM decided to write timesharing systems for it. The official IBM timesharing system, TSS/360, was delivered late, and when it finally arrived it was so big and slow that few sites converted over to it. It was eventually abandoned after its development had consumed some $50 million (Graham, 1970). But a group at IBM's Scientific Center in Cambridge, Massachusetts, produced a radically different system that IBM eventually accepted as a product, and which is now widely used on its mainframes.
This system, originally called CP/CMS and later renamed VM/370 (Seawright and MacKinnon, 1979), was based on a very astute observation: a timesharing system provides (1) multiprogramming and (2) an extended machine with a more convenient interface than the bare hardware. The essence of VM/370 is to completely separate these two functions.
The heart of the system, known as the virtual machine monitor, runs on the bare hardware and does the multiprogramming, providing not one, but several virtual machines to the next layer up, as shown in Fig. 1-19. However, unlike all other operating systems, these virtual machines are not extended machines, with files and other nice features. Instead, they are exact copies of the bare hardware, including kernel/user mode, I/O, interrupts, and everything else the real machine has.
Figure 1-19. The structure of VM/370 with CMS.
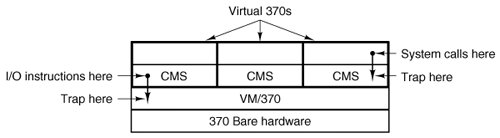
Because each virtual machine is identical to the true hardware, each one can run any operating system that will run directly on the bare hardware. Different virtual machines can, and frequently do, run different operating systems. Some run one of the descendants of OS/360 for batch or transaction processing, while others run a single-user, interactive system called CMS (Conversational Monitor System) for timesharing users.
When a CMS program executes a system call, the call is trapped to the operating-system in its own virtual machine, not to VM/370, just as it would if it were running on a real machine instead of a virtual one. CMS then issues the normal hardware I/O instructions for reading its virtual disk or whatever is needed to carry out the call. These I/O instructions are trapped by VM/370, which then performs them as part of its simulation of the real hardware. By making a complete separation of the functions of multiprogramming and providing an extended machine, each of the pieces can be much simpler, more flexible, and easier to maintain.
The idea of a virtual machine is used nowadays in a different context: running old MS-DOS programs on a Pentium. When designing the Pentium and its software, both Intel and Microsoft realized that there would be a big demand for running old software on new hardware. For this reason, Intel provided a virtual 8086 mode on the Pentium. In this mode, the machine acts like an 8086 (which is identical to an 8088 from a software point of view), including 16-bit addressing with a 1-MB limit.
This mode is used by Windows, and other operating systems for running old MS-DOS programs. These programs are started up in virtual 8086 mode. As long as they execute normal instructions, they run on the bare hardware. However, when a program tries to trap to the operating system to make a system call, or tries to do protected I/O directly, a trap to the virtual machine monitor occurs.
Two variants on this design are possible. In the first one, MS-DOS itself is loaded into the virtual 8086's address space, so the virtual machine monitor just reflects the trap back to MS-DOS, just as would happen on a real 8086. When MS-DOS later tries to do the I/O itself, that operation is caught and carried out by the virtual machine monitor.
In the other variant, the virtual machine monitor just catches the first trap and does the I/O itself, since it knows what all the MS-DOS system calls are and thus knows what each trap is supposed to do. This variant is less pure than the first one, since it emulates only MS-DOS correctly, and not other operating systems, as the first one does. On the other hand, it is much faster, since it saves the trouble of starting up MS-DOS to do the I/O. A further disadvantage of actually running MS-DOS in virtual 8086 mode is that MS-DOS fiddles around with the interrupt enable/disable bit quite a lot, all of which must be emulated at considerable cost.
It is worth noting that neither of these approaches are really the same as VM/370, since the machine being emulated is not a full Pentium, but only an 8086. With the VM/370 system, it is possible to run VM/370, itself, in the virtual machine. Even the earliest versions of Windows require at least a 286 and cannot be run on a virtual 8086.
Several virtual machine implementations are marketed commercially. For companies that provide web-hosting services, it can be more economical to run multiple virtual machines on a single fast server (perhaps one with multiple CPUs) than to run many small computers, each hosting a single Web site. VMWare and Microsoft's Virtual PC are marketed for such installations. These programs use large files on a host system as simulated disks for their guest systems. To achieve efficiency they analyze guest system program binaries and allow safe code to run directly on the host hardware, trapping instructions that make operating system calls. Such systems are also useful in education. For instance, students working on MINIX 3 lab assignments can work using MINIX 3 as a guest operating system on VMWare on a Windows, Linux or UNIX host with no risk of damaging other software installed on the same PC. Most professors teaching other subjects would be very nervous about sharing laboratory computers with an operating systems course where student mistakes could corrupt or erase disk data.
Another are a where virtual machines are used, but in a somewhat different way, is for running Java programs. When Sun Microsystems invented the Java programming language, it also invented a virtual machine (i.e., a computer architecture) called the JVM (Java Virtual Machine). The Java compiler produces code for JVM, which then typically is executed by a software JVM interpreter. The advantage of this approach is that the JVM code can be shipped over the Internet to any computer that has a JVM interpreter and run there. If the compiler had produced SPARC or Pentium binary programs, for example, they could not have been shipped and run anywhere as easily. (Of course, Sun could have produced a compiler that produced SPARC binaries and then distributed a SPARC interpreter, but JVM is a much simpler architecture to interpret.) Another advantage of using JVM is that if the interpreter is implemented properly, which is not completely trivial, incoming JVM programs can be checked for safety and then executed in a protected environment so they cannot steal data or do any damage.
1.5.4. Exokernels
With VM/370, each user process gets an exact copy of the actual computer. With virtual 8086 mode on the Pentium, each user process gets an exact copy of a different computer. Going one step further, researchers at M.I.T. built a system that gives each user a clone of the actual computer, but with a subset of the resources (Engler et al., 1995; and Leschke, 2004). Thus one virtual machine might get disk blocks 0 to 1023, the next one might get blocks 1024 to 2047, and so on.
At the bottom layer, running in kernel mode, is a program called the exokernel. Its job is to allocate resources to virtual machines and then check attempts to use them to make sure no machine is trying to use somebody else's resources. Each user-level virtual machine can run its own operating system, as on VM/370 and the Pentium virtual 8086s, except that each one is restricted to using only the resources it has asked for and been allocated.
The advantage of the exokernel scheme is that it saves a layer of mapping. In the other designs, each virtual machine thinks it has its own disk, with blocks running from 0 to some maximum, so the virtual machine monitor must maintain tables to remap disk addresses (and all other resources). With the exokernel, this remapping is not needed. The exokernel need only keep track of which virtual machine has been assigned which resource. This method still has the advantage of separating the multiprogramming (in the exokernel) from the user operating system code (in user space), but with less overhead, since all the exokernel has to do is keep the virtual machines out of each other's hair.
1.5.5. Client-Server Model
VM/370 gains much in simplicity by moving a large part of the traditional operating system code (implementing the extended machine) into a higher layer, CMS. Nevertheless, VM/370 itself is still a complex program because simulating a number of virtual 370s is not that simple (especially if you want to do it reasonably efficiently).
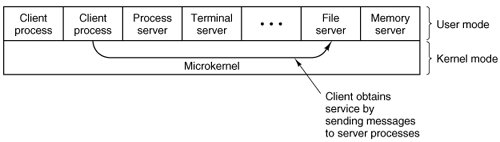
A trend in modern operating systems is to take this idea of moving code up into higher layers even further and remove as much as possible from the operating system, leaving a minimal kernel. The usual approach is to implement most of the operating system functions in user processes. To request a service, such as reading a block of a file, a user process (now known as the client process) sends the request to a server process, which then does the work and sends back the answer.
In this model, shown in Fig. 1-20, all the kernel does is handle the communication between clients and servers. By splitting the operating system up into parts, each of which only handles one facet of the system, such as file service, process service, terminal service, or memory service, each part becomes small and manageable. Furthermore, because all the servers run as user-mode processes, and not in kernel mode, they do not have direct access to the hardware. As a consequence, if a bug in the file server is triggered, the file service may crash, but this will not usually bring the whole machine down.
Figure 1-20. The client-server model.
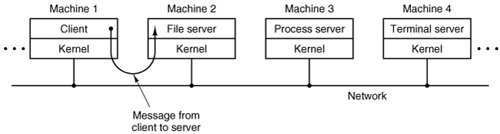
Another advantage of the client-server model is its adaptability to use in distributed systems (see Fig. 1-21). If a client communicates with a server by sending it messages, the client need not know whether the message is handled locally in its own machine, or whether it was sent across a network to a server on a remote machine. As far as the client is concerned, the same thing happens in both cases: a request was sent and a reply came back.
Figure 1-21. The client-server model in a distributed system.
The picture painted above of a kernel that handles only the transport of messages from clients to servers and back is not completely realistic. Some operating system functions (such as loading commands into the physical I/O device registers) are difficult, if not impossible, to do from user-space programs. There are two ways of dealing with this problem. One way is to have some critical server processes (e.g., I/O device drivers) actually run in kernel mode, with complete access to all the hardware, but still communicate with other processes using the normal message mechanism. A variant of this mechanism was used in earlier versions of MINIX where drivers were compiled into the kernel but ran as separate processes.
The other way is to build a minimal amount of mechanism into the kernel but leave the policy decisions up to servers in user space. For example, the kernel might recognize that a message sent to a certain special address means to take the contents of that message and load it into the I/O device registers for some disk, to start a disk read. In this example, the kernel would not even inspect the bytes in the message to see if they were valid or meaningful; it would just blindly copy them into the disk's device registers. (Obviously, some scheme for limiting such messages to authorized processes only must be used.) This is how MINIX 3 works, drivers are in user space and use special kernel calls to request reads and writes of I/O registers or to access kernel information. The split between mechanism and policy is an important concept; it occurs again and again in operating systems in various contexts.
EAN: 2147483647
Pages: 102
- Chapter III Two Models of Online Patronage: Why Do Consumers Shop on the Internet?
- Chapter V Consumer Complaint Behavior in the Online Environment
- Chapter VII Objective and Perceived Complexity and Their Impacts on Internet Communication
- Chapter XI User Satisfaction with Web Portals: An Empirical Study
- Chapter XVI Turning Web Surfers into Loyal Customers: Cognitive Lock-In Through Interface Design and Web Site Usability