2.6. The (Axis-Parallel BoxAxis-Parallel Box) Windowing Problem
| | ||
| | ||
| | ||
2.6. The (Axis-Parallel Box/ Axis-Parallel Box) Windowing Problem
We consider the problem of answering the following (axis-parallel box/axis-parallel box) windowing query. For a set of rectangular boxes, we want to find all boxes that are intersected by a query box B :
-
Input: a set S of rectangular boxes in 2D;
-
Query: a rectangular box B in 2D;
-
Output: all boxes of S that intersect with B .
Let us assume that a set S of n rectangular boxes B 1 , B 2 , , B n is given. A rectangular box B i has points inside B in the following three cases (see Figure 2.9):
-
The query B is fully contained in B i ;
-
An endpoint of B i lies inside B ;
-
A segment of B i crosses B , and no endpoint of B i is inside B .
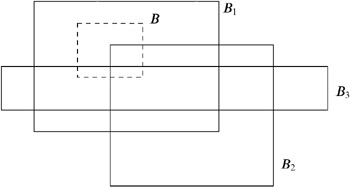
Figure 2.9: The box B i reported by a (axis-parallel box/axis-parallel box) windowing query for B contains B for i = 1, has a vertex inside B for i = 2, and has a segment that crosses B for i = 3.
For the first case, we can use a 2D segment tree of the boxes of S ; see Section 2.3. We answer (axis-parallel box/point) stabbing queries for the four end-points of B . These operations require O ( k 1 + log 2 n ) time and O ( n + log 2 n ) space, where k 1 denotes the number of boxes in S that fully contain B .
In the second case, we can use a range tree in 2D and answer a rectangular (point/axis-parallel box) windowing query for the endpoints of the B i s with respect to B ; see Section 2.5. This can be performed in time O ( k 2 + log 2 n ) and O ( n log n ) space, where k 2 denotes the number boxes B i with endpoints in B .
The third case cannot be solved directly with the former approaches. We have to answer the following (horizontal line segment/vertical line segment) stabbing query for the vertical line segments of box B and the horizontal line segments of all boxes B i for i = 1 , , n .
-
Input: a set S of horizontal line segments in 2D;
-
Query: a vertical line segment s in 2D;
-
Output: all segments of S intersected by s .
Of course, we have to answer also a (vertical line segment/horizontal line segment) stabbing query. This is done by a simple rotation of 90 degrees.
A subset of horizontal line segments of S is stabbed by the line passing through the vertical line segment s . Obviously, among these line segments, we must report all line segments whose left endpoints lie in a rectangular range grounded in s and going to ˆ ; see Figure 2.10. If s is given by ( x, y l ) and ( x, y u ), the corresponding box is represented by [ ˆ ˆ , x ] — [ y l , y u ].
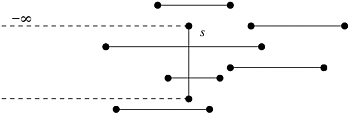
Figure 2.10: A rectangular range query by an infinite box grounded in s will answer the windowing query in the third case.
Now, we have a stabbing query and a range query, and we adapt an interval tree accordingly . The horizontal segments of S are stored in an interval tree for the x -coordinates of the segments. We have to report the horizontal segments h stabbed by the x -coordinate x of s . For the left endpoints of such a segment h , we have to take care that the y -coordinate of h lies also in the interval [ y l , y u ]. A node v of a regular interval tree contains the list S med of the segments hit by x med ; see Section 2.1. We replace the sorted list M L and M R of the left and right endpoints of S med by two range trees. A 2D range tree M L for the left endpoints of the segments in S med and a 2D range tree M R for the right endpoints of the segments in S med .
In Algorithm 2.1, we simply replace
with
This gives an additional log factor for the space of the structure. For an interval query and a node v , it suffices to check the corresponding 2D range trees. Note that all segments in S med are crossed by the line X = x med . For example, if x < x med , we use the range tree M L of the left endpoints of S med ; see Figure 2.11. We answer the range query for [ y l , y u ] — [ ˆ ˆ , x ]. Algorithm 2.2 is extended in a straightforward manner.
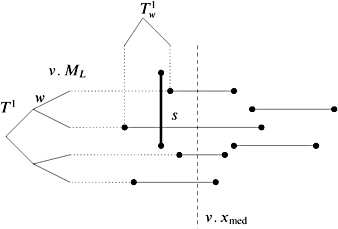
Figure 2.11: At the node v with a median v. x med in an interval tree, there is also a 2D range tree v. M L of the left endpoints of the segments in v. S med . v. M L answers the query [y l , y u ] — [ ˆ ˆ , x] for a segment s = [(x, y l ), (x, y u )].
In time O (log n + k v ), we can report the k v segments of S med at node v that hit s and go on with the left children and L med in the interval tree query. Altogether, we traverse log n nodes and report all k intersecting segments, which gives O ( k + log 2 n ) query time.
With the results from the previous section, we can construct the extended interval tree in O ( n log n ) with O ( n log n ) space.
Theorem 2.14. A 2D (axis-parallel box/axis parallel box) windowing query can be answered in O (log 2 + k ) time where k denotes the number of reported boxes. The corresponding data structures require O ( n log n ) space and are built up in O ( n log n ) time.
As a subresult, we have shown how to report all horizontal line segments that are crossed by a single vertical line segment.
Theorem 2.15. A (horizontal line segment/vertical line segment) stabbing query can be answered in O (log 2 + k ) time, where k denotes the number of reported line segments. The corresponding data structures require O ( n log n ) space and are built up in O ( n log n ) time.
A WeakDelete operation for the combined interval range tree can be done in O (log 2 n ) time, since we additionally have to make a WeakDelete in the 2D range tree.
Lemma 2.16. A WeakDelete operation for the combined interval range tree for n boxes in 2D can be performed in O (log 2 n ) time.
EAN: N/A
Pages: 69