9.11 Problems
9.11 Problems
| 1. | Assume the DCT coefficients of problem 3 of Chapter 8 are generated by an H.263 encoder. After zigzag scanning, and quantisation with th = q = 8, they are converted into three-dimensional events of (last, run, index). Identify these events. | |
| 2. | The neighbouring motion vectors of the motion vector MV are shown in Figure 9.42. Find:
| |
| 3. | The intensities of four pixels A, B, C and D of the borders of two macroblocks are given in Figure 9.43. Using the deblocking filter of eqn. 9.4, find the interpolated pixels, B1 and C1 at the macroblock boundary for each of:
Assume the quantiser parameter of macroblock 2 is QP = 16. | |
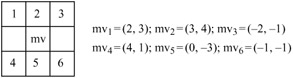
| 4. | Figure 9.44 shows the six neighbouring macroblocks of a lost motion vector. The value of these motion vectors are also given. Calculate the estimated motion vector for this macroblock for each of the following loss concealment methods:
| |
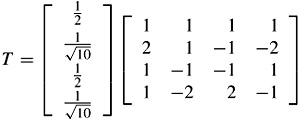
| 5. | Show that for the integer transforms of lengths four to be orthonormal, the DC and the second AC coefficients should be divided by 2, but the first and the third AC coefficients should be divided by | |
| 6. | A block of 4 × 4 pixels given by: is two-dimensionally transformed by a 4 × 4 DCT and the integer transform of problems 5. The coefficients are zigzag scanned and N out of 16 coefficients in the scanning order are retained. For each transform determine the reconstructed block, and its PSNR value, given that the number of retained coefficients are:
| |
| 7. | The fifty-two quantiser levels of an H.26L encoder may be indexed from 0 to 51. If at the lowest index index_0, the quantiser step size is Q, find the quantiser step sizes at the following indices:
| |
| 8. | If the lowest index of H.26L has the same quantisation step size as the lowest index of H.263, show that the H.26L quantiser is finer at lower step sizes but is coarser at larger step sizes than that of H.263. | |



Answers
| 1. | Prepend 0 to all events of problem 3 of Chapter 8, except the last event, where 1 should be appended, and no need for EOB, e.g. first event (0, 4, 0) and the last event (1, 2, -1) | ||||||||||||||||||||||||||||||||
| 2. | For x, the median of (3, 4, -1) is 3 and for y, the median of (-3, 3, 1) is 1. Hence the prediction vector is (3, 1) and MVD = (2 - 3 = -1; 1 - 1 = 0) = (-1, 0) | ||||||||||||||||||||||||||||||||
| 3. |
| ||||||||||||||||||||||||||||||||
| 4. |
| ||||||||||||||||||||||||||||||||
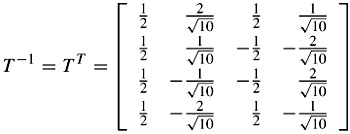
| 5. | In order for a matrix to be orthonormal, multiplying each row by itself should be 1. Hence in row 1 and 3 (basis vectors 0 and 2), their values are 4, hence they should be divided by Thus the forward 4 × 4 integer transform becomes And the inverse transform is its transpose As can be tested, this inverse transform is orthornormal, e.g.: | ||||||||||||||||||||||||||||||||
| 6. | With the integer transform of problem 5, the two-dimensional transform coefficients will be
The reconstructed pixels with the retained coefficients are; for N = 10:
which gives an MSE error of 128.75, or PSNR of 27.03 dB. The reconstructed pixels with the retained 6 and 3 coefficients give PSNR of 22.90 and 18 dB, respectively. With 4 × 4 DCT, these values are 26.7, 23.05 and 17.24 dB, respectively. As we see the integer transform has the same performance as the DCT. If we see it is even better for some, this is due to the approximation of cosine elements. | ||||||||||||||||||||||||||||||||
| 7. | index-0 = QP
| ||||||||||||||||||||||||||||||||
| 8. | Compared with H.263, at lower indices H.263 is coarser, e.g. at index-8 the quantiser parameter for H.263 is 8QP, but for H.26L is 2QP etc. At higher indices, the largest quantiser parameter for H.263 is 31QP, but that of H.26L is 88 QP, hence at larger indices H.26L has a coarser quantiser. |
EAN: 2147483647
Pages: 148