DRIVE CONTROLLERS AND INTERFACES
A hard drive uses its own internal controller board and processor to manage the interaction of read/write operations. The controller board also provides support for interfaces such as IDE/ATA, EIDE, or SCSI.
Before we continue with interface specifications, it is important for you to understand the basic connectors located on a typical hard drive (Figure 20.2). Two main connectors and a set of jumpers are usually located at the rear of the hard drive. The first connector is a 5-pin power connector that receives 5V and 12V DC power from the system’s power supply. The 5V power is the ‘dangerous power’ used by the hard drive’s circuit board. If the 5V power fluctuates, your hard drive’s circuit board and components may be in danger. The 12V power is used to power the hard drive’s motor and actuator heads. The second connector is an IDE 40-pin data connector or an SCSI connector. This connector is used to transmit and receive information and instructions from the computer’s processor.
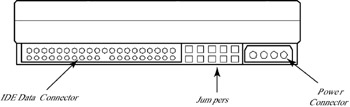
Figure 20.2: A hard drive with built-in connectors.
Plastic jumpers are used with IDE interfaces to set the configuration of the hard drive as either a master or a slave drive, along with the use of a data cable that supports multiple or shared interfaces. SCSI devices use plastic jumper blocks to uniquely identify SCSI drives or controller cards.
A hard drive communicates with a computer system through the use of an interface. Several communication transfer interfaces and standards ensure that a hard drive will be compatible with a system’s motherboard and processor. These standards are in place to assist manufacturers with a common set of electronic rules for interfaces.
ST506 Interface
Now obsolete, the ST506 was the first standard interface developed in 1980 by Seagate Technologies (ST). This interface required the installer to modify the CMOS configuration manually, provide a low-level format, partition the drive manually, and finally, provide a high-level format. This standard was universally accepted based on its ability to attach to a standard interface data cable.
ESDI Interface
Introduced in 1983, the Enhanced System Device Interface (ESDI) standard for hard drives was the first interface standard to have a controller actually reside on the hard drive itself. It required a compatible ESDI controller installed on the motherboard. ESDI technology was several times faster than ST506 and was much more expensive as a result.
IDE/ATA Interface
The IDE/ATA is currently the most widely accepted interface standard. The IDE is an interface controller built into the hard drive. ATA is actually a set of rules or specifications that apply to the IDE controller. The ATA standard is a 16-bit, parallel connection. ATA allows you to have a master drive (drive 0) and a slave drive (drive 1). ATA also provides a way for multiple hard drives to communicate with the same system bus. If your motherboard does not have an IDE/ATA interface, or your system only has one IDE controller, you can purchase an IDE add-on expansion card, such as a PCI card that supports this technology. This will allow you to have up to four devices.
One of the major advantages of IDE is that it can provide sector translation. This allows you to change the drive’s properties in CMOS configuration settings. It also allows computer systems to recognize hard drives larger than 528MB by utilizing Logical Block Addressing (LBA) support. LBA is considered a type of IDE transaction. You can enable LBA support, if available, in your BIOS configurations settings for your hard drive.
There are two common transfer methods or protocols used to communicate information between memory and an IDE/ATA hard drive controller:
Programmable Input/Output (PIO): PIO is a standard whereby the transfer of information between memory and the drive is controlled by the system’s processor. PIO is measured in megabytes per second. Most versions of IDE/ATA can utilize PIO modes 0 and 1. Table 20.1 shows PIO modes and transfer rates per second. IORDY is a CMOS configuration that controls the speed of a disk head as it moves across a platter. IORDY is used with PIO modes 3 and 4.
Direct Memory Access (DMA): All IDE/ATA hard drives support DMA. As mentioned in Chapter 18 DMA is used to transfer information from memory directly to a peripheral, such as a hard drive, without interrupting the processor.
| PIO Mode | Transfer Rate per Second | Standard |
|---|---|---|
| 0 | 3.3MB | ATA |
| 1 | 5.2MB | ATA |
| 2 | 8.3MB | ATA |
| 3 | 11.1MB | ATA-2 |
| 4 | 16.7MB | ATA-2/ATA-3 |
Several improvements have been made to the original implementation of the ATA standard interface. These improvements allow more devices to be attached to an ATA interface and increase the speed at which data can pass between an ATA interface and a device. Some of the ATA standards that you should be familiar with are listed below.
ATA: Traditional ATA, also known as IDE, provides support for up to two hard drives per controller. ATA has a 16-bit interface and utilizes PIO modes 0, 1, and 2.
ATA-2: ATA-2 provided support for LBA (drives larger than 504MB) and is sometimes referred to as Fast ATA. ATA-2 provides support for PIO modes 3 and 4. ATA-2 is basically the same technology as EIDE (which is discussed in the next section). It is an improvement on the original IDE/ATA standard that allows for up to four devices to be connected to one motherboard interface controller, for a total of eight devices in a typical system.
ATA-3: ATA-3 is the latest revision to the ATA standard. ATA-3 features enhanced security, better power management, support for PIO mode 4, and a new feature called Self-Monitoring Analysis and Report Technology (S.M.A.R.T.), which will warn you of certain failures.
Ultra-ATA: Known as Ultra-DMA, ATA-33, or UDMA/-33, Ultra-ATA provides support for multiword DMA mode 3 running at 33Mbps. The technology assists with keeping the CPU synchronized with faster hard drives.
Ultra-ATA/66: ATA/66 is an ATA version that doubles the traditional ATA throughput to 66Mbps. An ATA/66 data cable is different from an ATA/33 cable. You can differentiate the two by the number of wires in each data cable.
Ultra-ATA/100: ATA/100 is an ATA implementation that improves upon the bottlenecks caused by the ATA/66 version of ATA. The most significant difference between ATA/100 and ATA/66 is in the increased transfer rate and error-checking capabilities included with ATA/100. ATA/100 has a clock period of 20ns and a data transfer rate of 100Mbps. In order for a system to run in Ultra-ATA/100 mode, the following requirements must be met:
-
You must have an Ultra-ATA/100-capable system board and BIOS.
-
You must use an Ultra-ATA-capable 40-pin, 80-conductor cable.
-
You must use an operating system that can handle DMA transfers. Windows 95 (OSR2), Windows 98, Windows Me, Windows 2000, and Windows XP are all capable of this.
-
You must have an Ultra-ATA/100-compatible device, such as an ATA/100 hard drive.
Ultra ATA/133: As hard drive manufacturers continue to develop faster drives, the need for faster throughput between the host system and the hard drive is needed. To satisfy the bottleneck caused by the ATA/100, the faster ATA/133 was developed. ATA/133 has a clock period of 15ns and a data transfer rate of 133Mbps. Here are some features to remember regarding Ultra-ATA/133:
-
ATA/133 maintains backward compatibility with ATA/100, ATA/66, and ATA/33.
-
ATA/133 uses an 80 conductor cable with a 40-pin connector.
-
The ATA/133 solution addresses large hard drive accessibility issues, and ATA/133 allows the use of hard drives larger than 137.4GB.
EIDE (Similar To Ata-2) Interface
Enhanced IDE (EIDE) technology is the same technology as IDE/ATA. It improves on the original IDE standards by allowing ATA drives to utilize PIO modes 3 and 4. An EIDE interface can support up to four drives on the same interface, including CD-ROMs and tape drive units. EIDE uses Advanced Technology Attachment Packet Interface (ATAPI) standards to allow a controller to communicate with CD and tape drive devices.
Serial ATA (S-ATA)
Just about everything in the computer electronics world eventually evolves into something smaller, faster, and more efficient. This includes the standards for ATA. The Serial ATA (S-ATA) specification is a serial link point-to-point disk-interface connection standard that was developed by the Serial ATA Working Group to overcome some of the limitations of the earlier mentioned ATA (parallel) specifications. Serial ATA is a point-to-point connection that uses a special S-ATA serial cable, which makes use of a minimum of four wires for sending and receiving data. Figure 20.3 displays a Serial ATA cable and connector. Serial is faster than parallel. The clock rate of Serial ATA is a whopping 1.5GHz (150Mbps).

Figure 20.3: A Serial ATA cable.
Here are some very important points to remember regarding the new Serial ATA specification:
-
It uses a minimum of four wires with pairs for transmitting and receiving.
-
It is a point-to-point connection.
-
It has a maximum cable length of 3 feet.
-
The increased (3-foot) cable allows the use of external S-ATA compatible drives (drive arrays).
-
It will eliminate the need for master/slave jumper settings in the future.
-
S-ATA compatible devices are hot swappable.
-
Most newer computer systems support a maximum of two Serial ATA connections.
-
S-ATAs connect through PCI adapters or chips.
-
S-ATA uses a 7-pin connector that is much more compact than a traditional ATA connector.
-
Serial ATA is most often used in high-end servers with NAS (Network Attached Storage) units.
-
A Serial ATA controller is typically located on the motherboard or implemented as an add-in, RAID card.
-
With better pin efficiency, Serial ATA uses only 4 signal pins; parallel ATA uses 26 signal pins.
-
Serial ATA, which has lower voltage than parallel ATA, reduces input signaling voltages to approximately 250 millivolts, while parallel ATA signaling voltages can reach as high as 5V.
Note Serial ATA (S-ATA) has been identified as a CompTIA 2003 Objective. It is very likely that the A+ Core exam will ask you to identify Serial ATA connections on a motherboard. Pay close attention to Figure 20.4. Be familiar with this figure for the exam!
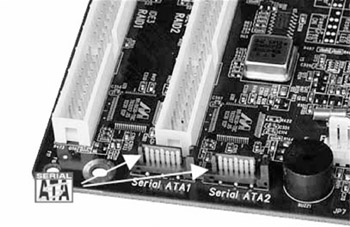
Figure 20.4: Serial ATA motherboard connections.
Make sure that you are familiar with the important points mentioned in this section. It is very likely that you will run across them in the exam room.
If you are interested in obtaining more information regarding Serial ATA, the following Tom’s Guides Publishing site has an excellent description of Serial ATA: http://www4.tomshardware.com/storage/20020812/.
The Serial ATA Working Group page is also quite informative: http://www.serialata.org/.
SCSI Interface
If you need more than four devices and want the fastest throughput available for storage devices, then an SCSI chain is what you want. An SCSI chain is a group of SCSI devices attached together with a centralized SCSI controller that requires only one IRQ for the entire chain of devices. SCSI is not technically defined as an interface; it is really an I/O bus in itself.
SCSI technology supports peripheral devices such as hard drives, hard disk arrays, tape units, and CD-ROMs.
| Note | If you want to attach a tape drive unit to an SCSI interface, you must enable INT 13h support on the SCSI controller card. |
SCSI devices have unique SCSI ID numbers associated with them. These ID numbers are typically set with a jumper block on the SCSI device that includes three switches. Each switch setting represents a series of binary numbers that set a unique ID for each device. Each number represents the device’s position on the SCSI chain; these numbers are 0 through 7 for an SCSI-1 chain. The highest ID that can be assigned on a three-jumper SCSI-1 device is 7. A typical SCSI-1 chain can have up to eight devices (numbered 0 to 7) attached to it. An SCSI controller card is considered a device and uses SCSI ID number 7. That leaves seven SCSI IDs (0 to 6) available for peripheral devices.
| Note | A SCSI controller card, otherwise known as an SCSI adapter card, can be plugged into any available PCI, VESA Local (VL-Bus), EISA, or ISA expansion slot. |
SCSI priorities are applied from the highest ID number on the SCSI chain to the lowest number. For example, on an SCSI-1 chain, the controller with the unique SCSI ID of 7 has the highest priority. The priority decreases as you move down the SCSI chain to device 0. The same is true for the more popular SCSI-2 chain, which allows for 16 devices numbered 0 to 15. Device 15 would have the highest priority on the chain; device 0 would have the lowest priority.
An SCSI chain must be terminated at both ends. Most SCSI devices come with a built-in terminator (terminator is another word for resistor). A terminator absorbs a signal so that the signal is not sent back to where it came from, causing a signal collision to occur. If you have an SCSI chain with a hard drive and a CD-ROM, you will need to terminate both ends of the SCSI chain for proper signal transmission to occur. In this case, you would terminate the SCSI hard drive and the SCSI CD-ROM.
There have been several improvements made to SCSI technology since its original implementation. The following list stresses the important facts in reference to SCSI advances.
SCSI-1: The original implementation of SCSI technology, SCSI-1 implements an 8-bit data bus and supports 4Mbps data transmission rates. It requires a host adapter and can support up to seven other devices. SCSI-1 uses a 25-pin DB connector.
SCSI-2: Similar to SCSI-1, except that SCSI-2 uses a 50-pin Centronics connector, SCSI-2 is the most common implementation of SCSI. It supports up to 16 devices, including the controller card. SCSI-2 introduced the concepts of bus mastering and command queuing to SCSI. These improvements increased transfer rates and allowed SCSI devices to handle multiple instruction sets.
SCSI-3: Also referred to as Fast/Wide SCSI, SCSI-3 is a combination of SCSI specifications. SCSI-3 utilizes a 16-bit bus and supports data transfer rates to 40Mbps. SCSI-3 includes three subsets that are known as SCSI parallel interface or SPI specifications. These specifications are SPI-1 (Ultra-SCSI), SPI-2 (Ultra 2 SCSI), and SPI-3 (Ultra 3 SCSI). Each specification adds to the functionality and throughput capabilities of SCSI-3. For the A+ test, 16-bit Fast/Wide SCSI is the most common implementation of SCSI.
SCSI Termination
Both ends of an SCSI bus must be terminated. The use of terminators prevents a signal from becoming distorted and prevents reflection that can cause severe data errors. There are two distinct types of SCSI termination used for a single-ended SCSI bus. They are known as active termination and passive termination:
-
Active termination uses what is called a voltage regulator to control the impedance at both ends of an SCSI bus. More stable than passive termination, active termination actually maintains a certain amount of impedance. Active termination was developed for a Fast SCSI-2 bus.
-
Passive termination uses what is called a terminating resistor at the end of an SCSI bus to reduce the amount of reflection. It does not regulate power between a device and a controller; instead it converts power (usually +5V) to an expected level of impedance. The main purpose of leveling out impedance is to prevent these reflections. This impedance level is typically close to that of the impedance level for the SCSI cable being used. Passive termination was designed for SCSI-1 or SCSI-2, and is less popular than active termination.
If you are interested in learning more details regarding SCSI and SCSI termination, it is suggested that you visit the STA (SCSI Trade Association) Web site at: http://www.scsita.org/aboutscsi/SCSI_Termination_Tutorial.html#top.
High-Voltage Differential (HVD)
The original SCSI standard for SCSI interfaces was named single-ended (SE) SCSI, or SCSI-1. This specification for SCSI devices, which used a 50-pin connector, proved very susceptible to noise and did not offer long SCSI cable lengths. The HVD SCSI specification was introduced to overcome the noise and short cable length issues present in the original (SE) SCSI specification.
High-voltage differential is a method by which an SCSI interface places data signals on SCSI cable. HVD SCSI interfaces utilize dual lines for each SCSI data signal. HVD SCSI is less susceptible to noise than SE and has a maximum cable length of 25 meters (approximately 82 feet). HVD SCSI interfaces can provide 20Mbps data transfer rates for narrow SCSI devices and 40Mbps transfers for wide SCSI. HVD SCSI uses +5V logic and terminators that run on 5V DC power.
Low-Voltage Differential (LVD)
Low-voltage differential is the newer data transmission standard for SCSI devices. LVD uses much less power than HVD and is less expensive. It is backward compatible with earlier single-ended SCSI (SCSI-1 and SCSI-2) and can automatically sense which type of SCSI you have. In other words, when your device is first powered up, LVD can distinguish whether your SCSI device is LVD compatible or single-ended. This auto-sensing LVD feature is called multimode operation. LVD device standards are defined (fall under) the Ultra 2 SCSI/SCSI-3 standards.
Here are some of the benefits included with the LVD standard:
-
Low-voltage differential uses 3.3V or 1.5V, which replaces the standard +5V used by HVD devices. It is highly advisable that you do not mix LVD and HVD on SCSI cable (BUS). They are not electronically compatible, and damage to your LVD-compatible device may result.
-
LVD uses a dual wire system (uses two wires for each signal) and filters noise more effectively than HVD.
-
The reduction in noise reflections allows for higher transmission rates, which in turn allows for the use of longer data cables. In simple terms, the data signals can travel farther.
Note HVD and LVD SCSI transmission standards have been identified as new A+ Core Hardware Objectives. Make sure you can identify their differences for the exam. Pay particular attention to the benefits of using LVD.
EAN: 2147483647
Pages: 390