[Page 410 (continued)]4.6. Segmentation The virtual memory discussed so far is one-dimensional because the virtual addresses go from 0 to some maximum address, one address after another. For many problems, having two or more separate virtual address spaces may be much better than having only one. For example, a compiler has many tables that are built up as compilation proceeds, possibly including
[Page 411] 1. | The source text being saved for the printed listing (on batch systems).
| 2. | The symbol table, containing the names and attributes of variables.
| 3. | The table containing all the integer and floating-point constants used.
| 4. | The parse tree, containing the syntactic analysis of the program.
| 5. | The stack used for procedure calls within the compiler.
|
Each of the first four tables grows continuously as compilation proceeds. The last one grows and shrinks in unpredictable ways during compilation. In a one-dimensional memory, these five tables would have to be allocated contiguous chunks of virtual address space, as in Fig. 4-21. Figure 4-21. In a one-dimensional address space with growing tables, one table may bump into another. 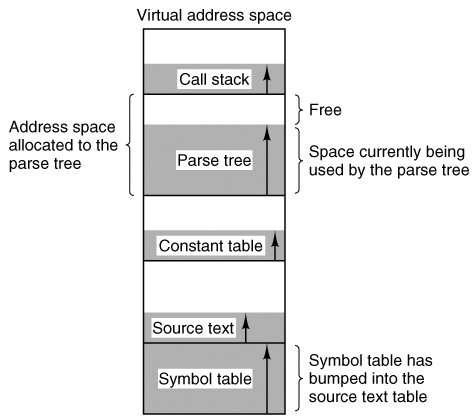
Consider what happens if a program has an exceptionally large number of variables but a normal amount of everything else. The chunk of address space allocated for the symbol table may fill up, but there may be lots of room in the other tables. The compiler could, of course, simply issue a message saying that the compilation cannot continue due to too many variables, but doing so does not seem very sporting when unused space is left in the other tables. Another possibility is to play Robin Hood, taking space from the tables with an excess of room and giving it to the tables with little room. This shuffling can be done, but it is analogous to managing one's own overlaysa nuisance at best and a great deal of tedious, unrewarding work at worst.
[Page 412]What is really needed is a way of freeing the programmer from having to manage the expanding and contracting tables, in the same way that virtual memory eliminates the worry of organizing the program into overlays. A straightforward and extremely general solution is to provide the machine with many completely independent address spaces, called segments. Each segment consists of a linear sequence of addresses, from 0 to some maximum. The length of each segment may be anything from 0 to the maximum allowed. Different segments may, and usually do, have different lengths. Moreover, segment lengths may change during execution. The length of a stack segment may be increased whenever something is pushed onto the stack and decreased whenever something is popped off the stack. Because each segment constitutes a separate address space, different segments can grow or shrink independently, without affecting each other. If a stack in a certain segment needs more address space to grow, it can have it, because there is nothing else in its address space to bump into. Of course, a segment can fill up but segments are usually very large, so this occurrence is rare. To specify an address in this segmented or two-dimensional memory, the program must supply a two-part address, a segment number, and an address within the segment. Figure 4-22 illustrates a segmented memory being used for the compiler tables discussed earlier. Five independent segments are shown here. Figure 4-22. A segmented memory allows each table to grow or shrink independently of the other tables. 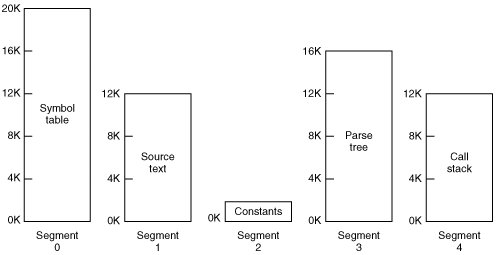
We emphasize that in its purest form, a segment is a logical entity, which the programmer is aware of and uses as a logical entity. A segment might contain one or more procedures, or an array, or a stack, or a collection of scalar variables, but usually it does not contain a mixture of different types.
[Page 413]A segmented memory has other advantages besides simplifying the handling of data structures that are growing or shrinking. If each procedure occupies a separate segment, with address 0 as its starting address, the linking up of procedures compiled separately is greatly simplified. After all the procedures that constitute a program have been compiled and linked up, a procedure call to the procedure in segment n will use the two-part address (n, 0) to address word 0 (the entry point). If the procedure in segment n is subsequently modified and recompiled, no other procedures need be changed (because no starting addresses have been modified), even if the new version is larger than the old one. With a one-dimensional memory, the procedures are packed tightly next to each other, with no address space between them. Consequently, changing one procedure's size can affect the starting address of other, unrelated procedures. This, in turn, requires modifying all procedures that call any of the moved procedures, in order to incorporate their new starting addresses. If a program contains hundreds of procedures, this process can be costly. Segmentation also facilitates sharing procedures or data between several processes. A common example is the shared library. Modern workstations that run advanced window systems often have extremely large graphical libraries compiled into nearly every program. In a segmented system, the graphical library can be put in a segment and shared by multiple processes, eliminating the need for having it in every process' address space. While it is also possible to have shared libraries in pure paging systems, it is much more complicated. In effect, these systems do it by simulating segmentation. Because each segment forms a logical entity of which the programmer is aware, such as a procedure, or an array, or a stack, different segments can have different kinds of protection. A procedure segment can be specified as execute only, prohibiting attempts to read from it or store into it. A floating-point array can be specified as read/write but not execute, and attempts to jump to it will be caught. Such protection is helpful in catching programming errors. You should try to understand why protection makes sense in a segmented memory but not in a one-dimensional paged memory. In a segmented memory the user is aware of what is in each segment. Normally, a segment would not contain a procedure and a stack, for example, but one or the other. Since each segment contains only one type of object, the segment can have the protection appropriate for that particular type. Paging and segmentation are compared in Fig. 4-23. Figure 4-23. Comparison of paging and segmentation. (This item is displayed on page 414 in the print version) Consideration | Paging | Segmentation | Need the programmer be aware that this technique is being used? | No | Yes | How many linear address spaces are there? | 1 | Many | Can the total address space exceed the size of physical memory? | Yes | Yes | Can procedures and data be distinguished and separately protected? | No | Yes | Can tables whose size fluctuates be accommodated easily? | No | Yes | Is sharing of procedures between users facilitated? | No | Yes | Why was this technique invented? | To get a large linear address space without having to buy more physical memory | To allow programs and data to be broken up into logically independent address spaces and to aid sharing and protection |
The contents of a page are, in a certain sense, accidental. The programmer is unaware of the fact that paging is even occurring. Although putting a few bits in each entry of the page table to specify the access allowed would be possible, to utilize this feature the programmer would have to keep track of where in his address space all the page boundaries were. However, that is precisely the sort of complex administration that paging was invented to eliminate. Because the user of a segmented memory has the illusion that all segments are in main memory all the timethat is, he can address them as though they werehe can protect each segment separately, without having to be concerned with the administration of overlaying them.
[Page 414] 4.6.1. Implementation of Pure Segmentation The implementation of segmentation differs from paging in an essential way: pages are fixed size and segments are not. Figure 4-24(a) shows an example of physical memory initially containing five segments. Now consider what happens if segment 1 is evicted and segment 7, which is smaller, is put in its place. We arrive at the memory configuration of Fig. 4-24(b). Between segment 7 and segment 2 is an unused areathat is, a hole. Then segment 4 is replaced by segment 5, as in Fig. 4-24(c), and segment 3 is replaced by segment 6, as in Fig. 4-24(d). After the system has been running for a while, memory will be divided up into a number of chunks, some containing segments and some containing holes. This phenomenon, called checkerboarding or external fragmentation, wastes memory in the holes. It can be dealt with by compaction, as shown in Fig. 4-24(e).
[Page 415] Figure 4-24. (a)-(d) Development of checkerboarding. (e) Removal of the checkerboarding by compaction. 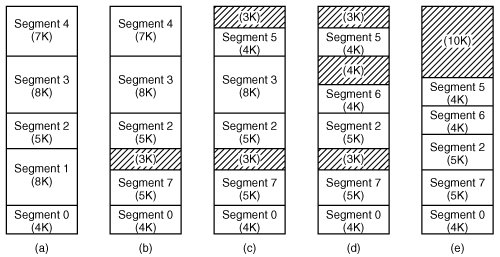
4.6.2. Segmentation with Paging: The Intel Pentium The Pentium supports up to 16K segments, each with up to 232 bytes of virtual address space. The Pentium can be set up (by the operating system) to use only segmentation, only paging, or both. Most operating systems, including Windows XP and all flavors of UNIX, use the pure paging model, in which each process has a single segment of 232 bytes. Since the Pentium is capable of providing processes with a much larger address space, and one operating system (OS/2) did actually use the full power of the addressing, we will describe how Pentium virtual memory works in its full generality. The heart of the Pentium virtual memory consists of two tables, the LDT (Local Descriptor Table) and the GDT (Global Descriptor Table). Each program has its own LDT, but there is a single GDT, shared by all the programs on the computer. The LDT describes segments local to each program, including its code, data, stack, and so on, whereas the GDT describes system segments, including the operating system itself. To access a segment, a Pentium program first loads a selector for that segment into one of the machine's six segment registers. During execution, the CS register holds the selector for the code segment and the DS register holds the selector for the data segment. The other segment registers are less important. Each selector is a 16-bit number, as shown in Fig. 4-25. Figure 4-25. A Pentium selector. (This item is displayed on page 416 in the print version) 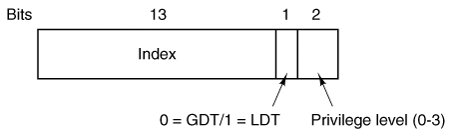
One of the selector bits tells whether the segment is local or global (i.e., whether it is in the LDT or GDT). Thirteen other bits specify the LDT or GDT entry number; thus tables are each restricted to holding 8K segment descriptors. The other 2 bits relate to protection, and will be described later. Descriptor 0 is forbidden. It may be safely loaded into a segment register to indicate that the segment register is not currently available. It causes a trap if used.
[Page 416] At the time a selector is loaded into a segment register, the corresponding descriptor is fetched from the LDT or GDT and stored in microprogram registers, so it can be accessed quickly. A descriptor consists of 8 bytes, including the segment's base address, size, and other information, as depicted in Fig. 4-26. Figure 4-26. Pentium code segment descriptor. Data segments differ slightly. 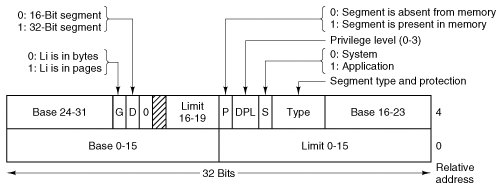
The format of the selector has been cleverly chosen to make locating the descriptor easy. First either the LDT or GDT is selected, based on selector bit 2. Then the selector is copied to an internal scratch register, and the 3 low-order bits set to 0. Finally, the address of either the LDT or GDT table is added to it, to give a direct pointer to the descriptor. For example, selector 72 refers to entry 9 in the GDT, which is located at address GDT + 72. Let us trace the steps by which a (selector, offset) pair is converted to a physical address. As soon as the microprogram knows which segment register is being used, it can find the complete descriptor corresponding to that selector in its internal registers. If the segment does not exist (selector 0), or is currently paged out, a trap occurs. It then checks to see if the offset is beyond the end of the segment, in which case a trap also occurs. Logically, there should simply be a 32-bit field in the descriptor giving the size of the segment, but there are only 20 bits available, so a different scheme is used. If the gbit (Granularity) field is 0, the limit field is the exact segment size, up to 1 MB. If it is 1, the limit field gives the segment size in pages instead of bytes. The Pentium page size is fixed at 4 KB, so 20 bits are enough for segments up to 232 bytes.
[Page 417] Assuming that the segment is in memory and the offset is in range, the Pentium then adds the 32-bit base field in the descriptor to the offset to form what is called a linear address, as shown in Fig. 4-27. The base field is broken up into three pieces and spread all over the descriptor for compatibility with the 286, in which the base is only 24 bits. In effect, the base field allows each segment to start at an arbitrary place within the 32-bit linear address space. Figure 4-27. Conversion of a (selector, offset) pair to a linear address. 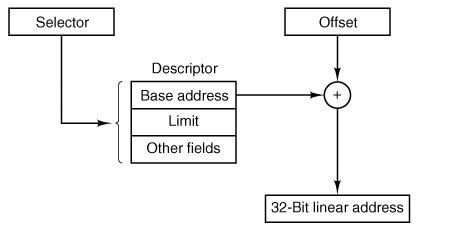
If paging is disabled (by a bit in a global control register), the linear address is interpreted as the physical address and sent to the memory for the read or write. Thus with paging disabled, we have a pure segmentation scheme, with each segment's base address given in its descriptor. Segments are permitted to overlap, incidentally, probably because it would be too much trouble and take too much time to verify that they were all disjoint. On the other hand, if paging is enabled, the linear address is interpreted as a virtual address and mapped onto the physical address using page tables, pretty much as in our earlier examples. The only real complication is that with a 32-bit virtual address and a 4-KB page, a segment might contain 1 million pages, so a two-level mapping is used to reduce the page table size for small segments. Each running program has a page directory consisting of 1024 32-bit entries. It is located at an address pointed to by a global register. Each entry in this directory points to a page table also containing 1024 32-bit entries. The page table entries point to page frames. The scheme is shown in Fig. 4-28. Figure 4-28. Mapping of a linear address onto a physical address. (This item is displayed on page 418 in the print version) 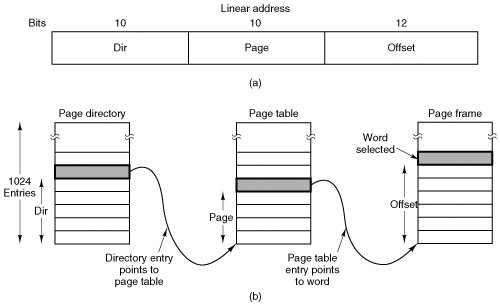
In Fig. 4-28(a) we see a linear address divided into three fields, dir, page, and offset. The dir field is used to index into the page directory to locate a pointer to the proper page table. Then the page field is used as an index into the page table to find the physical address of the page frame. Finally, offset is added to the address of the page frame to get the physical address of the byte or word needed.
[Page 418] The page table entries are 32 bits each, 20 of which contain a page frame number. The remaining bits contain access and dirty bits, set by the hardware for the benefit of the operating system, protection bits, and other utility bits. Each page table has entries for 1024 4-KB page frames, so a single page table handles 4 megabytes of memory. A segment shorter than 4-MB will have a page directory with a single entry, a pointer to its one and only page table. In this way, the overhead for short segments is only two pages, instead of the million pages that would be needed in a one-level page table. To avoid making repeated references to memory, the Pentium has a small TLB that directly maps the most recently used dirpage combinations onto the physical address of the page frame. Only when the current combination is not present in the TLB is the mechanism of Fig. 4-28 actually carried out and the TLB updated. As long as TLB misses are rare, performance is good. A little thought will reveal the fact that when paging is used, there is really no point in having the base field in the descriptor be nonzero. All that base does is cause a small offset to use an entry in the middle of the page directory, instead of at the beginning. The real reason for including base at all is to allow pure (non-paged) segmentation, and for compatibility with the 286, which always has paging disabled (i.e., the 286 has only pure segmentation, but not paging).
[Page 419]It is also worth noting that if some application does not need segmentation but is content with a single, paged, 32-bit address space, that model is possible. All the segment registers can be set up with the same selector, whose descriptor has base = 0 and limit set to the maximum. The instruction offset will then be the linear address, with only a single address space usedin effect, normal paging. In fact, all current operating systems for the Pentium work this way. OS/2 was the only one that used the full power of the Intel MMU architecture. All in all, one has to give credit to the Pentium designers. Given the conflicting goals of implementing pure paging, pure segmentation, and paged segments, while at the same time being compatible with the 286, and doing all of this efficiently, the resulting design is surprisingly simple and clean. Although we have covered the complete architecture of the Pentium virtual memory, albeit briefly, it is worth saying a few words about protection, since this subject is intimately related to the virtual memory. The Pentium supports four protection levels with level 0 being the most privileged and level 3 the least. These are shown in Fig. 4-29. At each instant, a running program is at a certain level, indicated by a 2-bit field in its PSW. Each segment in the system also has a level. Figure 4-29. Protection on the Pentium. 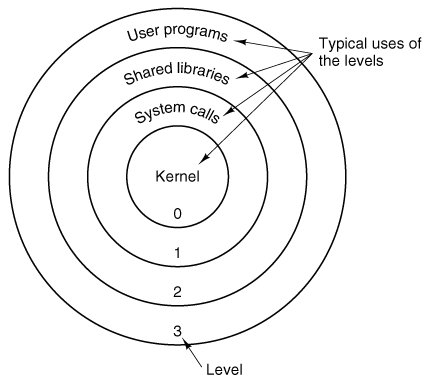
As long as a program restricts itself to using segments at its own level, everything works fine. Attempts to access data at a higher level are permitted. Attempts to access data at a lower level are illegal and cause traps. Attempts to call procedures at a different level (higher or lower) are allowed, but in a carefully controlled way. To make an interlevel call, the CALL instruction must contain a selector instead of an address. This selector designates a descriptor called a call gate, which gives the address of the procedure to be called. Thus it is not possible to jump into the middle of an arbitrary code segment at a different level. Only official entry points may be used.
[Page 420] A typical use for this mechanism is suggested in Fig. 4-29. At level 0, we find the kernel of the operating system, which handles I/O, memory management, and other critical matters. At level 1, the system call handler is present. User programs may call procedures here to have system calls carried out, but only a specific and protected list of procedures may be called. Level 2 contains library procedures, possibly shared among many running programs. User programs may call these procedures and read their data, but they may not modify them. Finally, user programs run at level 3, which has the least protection. Traps and interrupts use a mechanism similar to the call gates. They, too, reference descriptors, rather than absolute addresses, and these descriptors point to specific procedures to be executed. The type field in Fig. 4-26 distinguishes between code segments, data segments, and the various kinds of gates. |