Section 3.2. Principles of IO Software
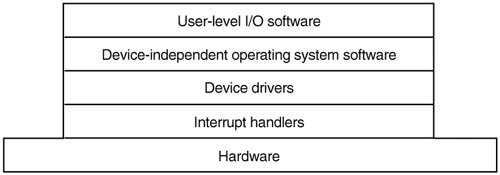
3.2. Principles of I/O SoftwareLet us now turn away from the I/O hardware and look at the I/O software. First we will look at the goals of the I/O software and then at the different ways I/O can be done from the point of view of the operating system. 3.2.1. Goals of the I/O SoftwareA key concept in the design of I/O software is device independence. What this means is that it should be possible to write programs that can access any I/O device without having to specify the device in advance. For example, a program that reads a file as input should be able to read a file on a floppy disk, on a hard disk, or on a CD-ROM, without having to modify the program for each different device. Similarly, one should be able to type a command such as sort <input >output and have it work with input coming from a floppy disk, an IDE disk, a SCSI disk, or the keyboard, and the output going to any kind of disk or the screen. It is up to the operating system to take care of the problems caused by the fact that these devices really are different and require very different command sequences to read or write. Closely related to device independence is the goal of uniform naming. The name of a file or a device should simply be a string or an integer and not depend on the device in any way. In UNIX and MINIX 3, all disks can be integrated into the file system hierarchy in arbitrary ways so the user need not be aware of which name corresponds to which device. For example, a floppy disk can be mounted on top of the directory /usr/ast/backup so that copying a file to that directory copies the file to the diskette. In this way, all files and devices are addressed the same way: by a path name. Another important issue for I/O software is error handling. In general, errors should be handled as close to the hardware as possible. If the controller discovers a read error, it should try to correct the error itself if it can. If it cannot, then the device driver should handle it, perhaps by just trying to read the block again. Many errors are transient, such as read errors caused by specks of dust on the read head, and will go away if the operation is repeated. Only if the lower layers are not able to deal with the problem should the upper layers be told about it. In many cases, error recovery can be done transparently at a low level without the upper levels even knowing about the error. Still another key issue is synchronous (blocking) versus asynchronous (interrupt-driven) transfers. Most physical I/O is asynchronousthe CPU starts the transfer and goes off to do something else until the interrupt arrives. User programs are much easier to write if the I/O operations are blockingafter a receive system call the program is automatically suspended until the data are available in the buffer. It is up to the operating system to make operations that are actually interrupt-driven look blocking to the user programs. Another issue for the I/O software is buffering. Often data that come off a device cannot be stored directly in its final destination. For example, when a packet comes in off the network, the operating system does not know where to put it until it has stored the packet somewhere and examined it. Also, some devices have severe real-time constraints (for example, digital audio devices), so the data must be put into an output buffer in advance to decouple the rate at which the buffer is filled from the rate at which it is emptied, in order to avoid buffer under-runs. Buffering involves considerable copying and often has a major impact on I/O performance. The final concept that we will mention here is sharable versus dedicated devices. Some I/O devices, such as disks, can be used by many users at the same time. No problems are caused by multiple users having open files on the same disk at the same time. Other devices, such as tape drives, have to be dedicated to a single user until that user is finished. Then another user can have the tape drive. Having two or more users writing blocks intermixed at random to the same tape will definitely not work. Introducing dedicated (unshared) devices also introduces a variety of problems, such as deadlocks. Again, the operating system must be able to handle both shared and dedicated devices in a way that avoids problems. I/O software is often organized in four layers, as shown in Fig. 3-5. In the following subsections we will look at each in turn, starting at the bottom. The emphasis in this chapter is on the device drivers (layer 2), but we will summarize the rest of the I/O software to show how the pieces of the I/O system fit together. Figure 3-5. Layers of the I/O software system. 3.2.2. Interrupt HandlersInterrupts are an unpleasant fact of life; although they cannot be avoided, they should be hidden away, deep in the bowels of the operating system, so that as little of the operating system as possible knows about them. The best way to hide them is to have the driver starting an I/O operation block until the I/O has completed and the interrupt occurs. The driver can block itself by doing a down on a semaphore, a wait on a condition variable, a receive on a message, or something similar, for example. When the interrupt happens, the interrupt procedure does whatever it has to in order to handle the interrupt. Then it can unblock the driver that started it. In some cases it will just complete up on a semaphore. In others it will do a signal on a condition variable in a monitor. In still others, it will send a message to the blocked driver. In all cases the net effect of the interrupt will be that a driver that was previously blocked will now be able to run. This model works best if drivers are structured as independent processes, with their own states, stacks, and program counters. 3.2.3. Device DriversEarlier in this chapter we saw that each device controller has registers used to give it commands or to read out its status or both. The number of registers and the nature of the commands vary radically from device to device. For example, a mouse driver has to accept information from the mouse telling how far it has moved and which buttons are currently depressed. In contrast, a disk driver has to know about sectors, tracks, cylinders, heads, arm motion, motor drives, head settling times, and all the other mechanics of making the disk work properly. Obviously, these drivers will be very different. Thus, each I/O device attached to a computer needs some device-specific code for controlling it. This code, called the device driver, is generally written by the device's manufacturer and delivered along with the device on a CD-ROM. Since each operating system needs its own drivers, device manufacturers commonly supply drivers for several popular operating systems. Each device driver normally handles one device type, or one class of closely related devices. For example, it would probably be a good idea to have a single mouse driver, even if the system supports several different brands of mice. As another example, a disk driver can usually handle multiple disks of different sizes and different speeds, and perhaps a CD-ROM as well. On the other hand, a mouse and a disk are so different that different drivers are necessary. In order to access the device's hardware, meaning the controller's registers, the device driver traditionally has been part of the system kernel. This approach gives the best performance and the worst reliability since a bug in any device driver can crash the entire system. MINIX 3 departs from this model in order to enhance reliability. As we shall see, in MINIX 3 each device driver is now a separate user-mode process. As we mentioned earlier, operating systems usually classify drivers as block devices, such as disks, or character devices, such as keyboards and printers. Most operating systems define a standard interface that all block drivers must support and a second standard interface that all character drivers must support. These interfaces consist of a number of procedures that the rest of the operating system can call to get the driver to do work for it. In general terms, the job of a device driver is to accept abstract requests from the device-independent software above it and see to it that the request is executed. A typical request to a disk driver is to read block n. If the driver is idle at the time a request comes in, it starts carrying out the request immediately. If, however, it is already busy with a request, it will normally enter the new request into a queue of pending requests to be dealt with as soon as possible. The first step in actually carrying out an I/O request is to check that the input parameters are valid and to return an error if they are not. If the request is valid the next step is to translate it from abstract to concrete terms. For a disk driver, this means figuring out where on the disk the requested block actually is, checking to see if the drive's motor is running, determining if the arm is positioned on the proper cylinder, and so on. In short, the driver must decide which controller operations are required and in what sequence. Once the driver has determined which commands to issue to the controller, it starts issuing them by writing into the controller's device registers. Simple controllers can handle only one command at a time. More sophisticated controllers are willing to accept a linked list of commands, which they then carry out by themselves without further help from the operating system. After the command or commands have been issued, one of two situations will apply. In many cases the device driver must wait until the controller does some work for it, so it blocks itself until the interrupt comes in to unblock it. In other cases, however, the operation finishes without delay, so the driver need not block. As an example of the latter situation, scrolling the screen on some graphics cards requires just writing a few bytes into the controller's registers. No mechanical motion is needed, so the entire operation can be completed in a few microseconds. In the former case, the blocked driver will be awakened by the interrupt. In the latter case, it will never go to sleep. Either way, after the operation has been completed, it must check for errors. If everything is all right, the driver may have data to pass to the device-independent software (e.g., a block just read). Finally, it returns some status information for error reporting back to its caller. If any other requests are queued, one of them can now be selected and started. If nothing is queued, the driver blocks waiting for the next request. Dealing with requests for reading and writing is the main function of a driver, but there may be other requirements. For instance, the driver may need to initialize a device at system startup or the first time it is used. Also, there may be a need to manage power requirements, handle Plug 'n Play, or log events. 3.2.4. Device-Independent I/O SoftwareAlthough some of the I/O software is device specific, a large fraction of it is device independent. The exact boundary between the drivers and the device-independent software is system dependent, because some functions that could be done in a device-independent way may actually be done in the drivers, for efficiency or other reasons. The functions shown in Fig. 3-6 are typically done in the device-independent software. In MINIX 3, most of the device-independent software is part of the file system. Although we will study the file system in Chap. 5, we will take a quick look at the device-independent software here, to provide some perspective on I/O and show better where the drivers fit in.
The basic function of the device-independent software is to perform the I/O functions that are common to all devices and to provide a uniform interface to the user-level software. Below we will look at the above issues in more detail. Uniform Interfacing for Device DriversA major issue in an operating system is how to make all I/O devices and drivers look more-or-less the same. If disks, printers, monitors, keyboards, etc., are all interfaced in different ways, every time a new peripheral device comes along, the operating system must be modified for the new device. In Fig. 3-7(a) we illustrate symbolically a situation in which each device driver has a different interface to the operating system. In contrast, in Fig. 3-7(b), we show a different design in which all drivers have the same interface. Figure 3-7. (a) Without a standard driver interface. (b) With a standard driver interface.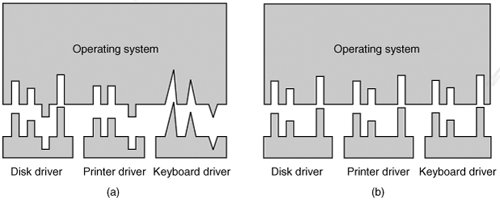 With a standard interface it is much easier to plug in a new driver, providing it conforms to the driver interface. It also means that driver writers know what is expected of them (e.g., what functions they must provide and what kernel functions they may call). In practice, not all devices are absolutely identical, but usually there are only a small number of device types and even these are generally almost the same. For example, even block and character devices have many functions in common. Another aspect of having a uniform interface is how I/O devices are named. The device-independent software takes care of mapping symbolic device names onto the proper driver. For example, in UNIX and MINIX 3 a device name, such as /dev/disk0, uniquely specifies the i-node for a special file, and this i-node contains the major device number, which is used to locate the appropriate driver. The inode also contains the minor device number, which is passed as a parameter to the driver in order to specify the unit to be read or written. All devices have major and minor numbers, and all drivers are accessed by using the major device number to select the driver. Closely related to naming is protection. How does the system prevent users from accessing devices that they are not entitled to access? In UNIX, MINIX 3, and also in later Windows versions such as Windows 2000 and Windows XP, devices appear in the file system as named objects, which means that the usual protection rules for files also apply to I/O devices. The system administrator can then set the proper permissions (i.e., in UNIX the rwx bits) for each device. BufferingBuffering is also an issue for both block and character devices. For block devices, the hardware generally insists upon reading and writing entire blocks at once, but user processes are free to read and write in arbitrary units. If a user process writes half a block, the operating system will normally keep the data around internally until the rest of the data are written, at which time the block can go out to the disk. For character devices, users can write data to the system faster than it can be output, necessitating buffering. Keyboard input that arrives before it is needed also requires buffering. Error ReportingErrors are far more common in the context of I/O than in any other context. When they occur, the operating system must handle them as best it can. Many errors are device-specific, so only the driver knows what to do (e.g., retry, ignore, or panic). A typical error is caused by a disk block that has been damaged and cannot be read any more. After the driver has tried to read the block a certain number of times, it gives up and informs the device-independent software. How the error is treated from here on is device independent. If the error occurred while reading a user file, it may be sufficient to report the error back to the caller. However, if it occurred while reading a critical system data structure, such as the block containing the bitmap showing which blocks are free, the operating system may have to display an error message and terminate. Allocating and Releasing Dedicated DevicesSome devices, such as CD-ROM recorders, can be used only by a single process at any given moment. It is up to the operating system to examine requests for device usage and accept or reject them, depending on whether the requested device is available or not. A simple way to handle these requests is to require processes to perform opens on the special files for devices directly. If the device is unavailable, the open fails. Closing such a dedicated device then releases it. Device-Independent Block SizeNot all disks have the same sector size. It is up to the device-independent software to hide this fact and provide a uniform block size to higher layers, for example, by treating several sectors as a single logical block. In this way, the higher layers only deal with abstract devices that all use the same logical block size, independent of the physical sector size. Similarly, some character devices deliver their data one byte at a time (e.g., modems), while others deliver theirs in larger units (e.g., network interfaces). These differences may also be hidden. 3.2.5. User-Space I/O SoftwareAlthough most of the I/O software is within the operating system, a small portion of it consists of libraries linked together with user programs, and even whole programs running outside the kernel. System calls, including the I/O system calls, are normally made by library procedures. When a C program contains the call count = write(fd, buffer, nbytes); the library procedure write will be linked with the program and contained in the binary program present in memory at run time. The collection of all these library procedures is clearly part of the I/O system. While these procedures do little more than put their parameters in the appropriate place for the system call, there are other I/O procedures that actually do real work. In particular, formatting of input and output is done by library procedures. One example from C is printf, which takes a format string and possibly some variables as input, builds an ASCII string, and then calls write to output the string. As an example of printf, consider the statement printf("The square of %3d is %6d\n", i, i*i); It formats a string consisting of the 14-character string "The square of" followed by the value i as a 3-character string, then the 4-character string "is", then i2 as six characters, and finally a line feed. An example of a similar procedure for input is scanf which reads input and stores it into variables described in a format string using the same syntax as printf. The standard I/O library contains a number of procedures that involve I/O and all run as part of user programs. Not all user-level I/O software consists of library procedures. Another important category is the spooling system. Spooling is a way of dealing with dedicated I/O devices in a multiprogramming system. Consider a typical spooled device:a printer. Although it would be technically simple to let any user process open the character special file for the printer, suppose a process opened it and then did nothing for hours? No other process could print anything. Instead what is done is to create a special process, called a daemon, and a special directory, called a spooling directory. To print a file, a process first generates the entire file to be printed and puts it in the spooling directory. It is up to the daemon, which is the only process having permission to use the printer's special file, to print the files in the directory. By protecting the special file against direct use by users, the problem of having someone keeping it open unnecessarily long is eliminated. Spooling is used not only for printers, but also in various other situations. For example, electronic mail usually uses a daemon. When a message is submitted it is put in a mail spool directory. Later on the mail daemon tries to send it. At any given instant of time a particular destination may be temporarily unreachable, so the daemon leaves the message in the spool with status information indicating it should be tried again in a while. The daemon may also send a message back to the sender saying delivery is delayed, or, after a delay of hours or days, saying the message cannot be delivered. All of this is outside the operating system. Figure 3-8 summarizes the I/O system, showing the layers and principal functions of each layer. Starting at the bottom, the layers are the hardware, interrupt handlers, device drivers, device-independent software, and the user processes. Figure 3-8. Layers of the I/O system and the main functions of each layer.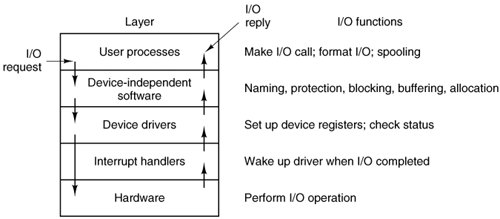 The arrows in Fig. 3-8 show the flow of control. When a user program tries to read a block from a file, for example, the operating system is invoked to carry out the call. The device-independent software looks for it in the buffer cache, for example. If the needed block is not there, it calls the device driver to issue the request to the hardware to go get it from the disk. The process is then blocked until the disk operation has been completed. When the disk is finished, the hardware generates an interrupt. The interrupt handler is run to discover what has happened, that is, which device wants attention right now. It then extracts the status from the device and wakes up the sleeping process to finish off the I/O request and let the user process continue. |
EAN: 2147483647
Pages: 102