RELIABILITY IMPROVEMENT THROUGH PARAMETER DESIGN
Two special categories of covariates in any parameter design are design parameters (or control factors) and error variables (or noise factors). The terms in parenthesis are the equivalent terms within the context of robustness, which we already have discussed in Volume V of this series.
The achievement of higher reliability can also be viewed as an improvement to robustness. Robustness is defined as reduced sensitivity to noise factors. In most industries, noise factors have five main categories:
-
Piece to piece variation
-
Changes to component characteristics over time
-
Customer duty cycle
-
Environmental conditions
-
Interfacing (environment created by neighboring components in the system)
Typically, noises in categories 3, 4, and 5 can induce noises in category 2. If the function of the component can be made robust to noises in category 2, then the component will, by definition, be more reliable. Often, noise category 1 contributes to infant mortality, category 2 to degradation, and categories 3, 4, and 5 to useful life problems. Recognizing this pattern of noises, we can relate them to the bathtub curve (see Figure 7.1) for the hazard function.
Often, knowing the type of failure rate that is acting on our component can give a clue as to the offending noise factor and hence lead to a root cause analysis of the failure mechanism. Components can be made robust to noises by experimenting with control factors. The idea (as in robustness generally ) is to look for interactions between control and noise factors. The reliability connection is made if there is a "time lag" between the extremes of the noise space, denoted N- and N+, say ” see Figure 7.6.
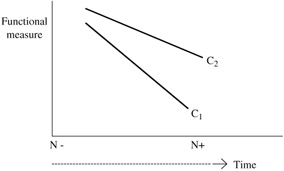
Figure 7.6: Control factors and noise interactions.
Note that the functional measure is not failure time, but some ideal function of the system. C 1 and C 2 represent two settings of a control factor. A design with C 2 is more robust to noise than one with C 1 and is therefore more reliable. Note: A closely related area to robustness in reliability studies is Accelerated Degradation Testing (ADT), which is closely associated with Accelerated Life Testing (ALT).
A parameter design layout in reliability applications follows the pattern for parameter design studies, as in the example shown in Figure 7.7.
| Configuration | Control Factors | Noise Factors time | ||||
|---|---|---|---|---|---|---|
| A | B | C ... | G | N-(new) | N+(old) | |
| - | - | - | - | Y1- | Y1+ | |
| 2 | + | - | - | + | Y2- | Y2+ |
| 3 | - | + | - | + | Y3- | Y3+ |
| 4 | + | + | - | - | Y4- | Y4+ |
| 5 | - | - | + | + | Ys- | Ys+ |
| 6 | + | - | + | - | Y6- | Y6+ |
| 7 | - | + | + | - | Y7- | Y7+ |
| 8 | + | + | + | + | Y8- | Y8+ |
Figure 7.7: An example of a parameter design in reliability usage.
The idea of experimental layouts of this type is to look for interactions between control factors and noise factors, which lead to configurations with minimum difference between the y values.
EAN: 2147483647
Pages: 235