Section 4.8. Implementation of the MINIX 3 Process Manager
4.8. Implementation of the MINIX 3 Process ManagerArmed with a general overview of how the PM works, let us now turn to the code itself. The PM is written entirely in C, is straightforward, and contains a substantial amount of commentary in the code itself, so our treatment of most parts need not be long or involved. We will first look briefly at the header files, then the main program, and finally the files for the various system call groups discussed previously. 4.8.1. The Header Files and Data StructuresSeveral header files in the PM source directory have the same names as files in the kernel directory; these names will be seen again in the file system. These files have similar functions in their own contexts. The parallel structure is designed to make it easier to understand the organization of the whole MINIX 3 system. The PM also has a number of headers with unique names. As in other parts of the system, storage for global variables is reserved when the PM's version of table.c is compiled. In this section we will look at all of the header files, as well as table.c. As with the other major parts of MINIX 3, the PM has a master header file, pm.h (line 17000). It is included in every compilation, and it in turn includes all the system-wide header files from /usr/include and its subdirectories that are needed by every object module. Most of the files that are included in kernel/kernel.h are also included here. The PM also needs some definitions in include/fcntl.h and include/unistd.h. The PM's own versions of const.h, type.h, proto.h, and glo.h also are included. We saw a similar structure with the kernel. Const.h (line 17100) defines some constants used by the PM. Type.h is currently unused and exists in skeletal form just so the PM files will have the same organization as the other parts of MINIX 3. Proto.h (line 17300) collects in one place function prototypes needed throughout the PM. Dummy definitions of some functions needed when swapping is compiled into MINIX 3 are found on lines 17313 and 17314. Putting these macros here simplifies compiling a version without swapping; otherwise many other source files would have to be modified to remove calls to these functions. The PM's global variables are declared in glo.h (line 17500). The same trick used in the kernel with EXTERN is used here, namely, EXTERN is normally a macro that expands to extern, except in the file table.c. There it becomes the null string so storage can be reserved for the variables declared as EXTERN. The first of these variables, mp, is a pointer to an mproc structure, the PM part of the process table for the process whose system call is being processed. The second variable, procs_in_use, keeps track of how many process slots are currently in use, making it easy to see if a fork call is feasible. The message buffer m_in is for the request messages. Who is the index of the current process; it is related to mp by mp = &mproc[who]; When a message comes in, the system call number is extracted from it and put in call_nr. MINIX 3 writes an image of a process to a core file when a process terminates abnormally. Core_name defines the name this file will have, core_sset is a bitmap which defines which signals should produce core dumps, and ign_sset is a bitmap telling which signals should be ignored. Note that core_name is defined extern, not EXTERN. The array call_vec is also declared as extern. The reason for making both of these declarations this way will be explained when we discuss table.c. The PM's part of the process table is in the next file, mproc.h (line 17600). Most of the fields are adequately described by their comments. Several fields deal with signal handling. Mp_ignore, mp_catch, mp_sig2mess, mp_sigmask, mp_sigmask2, and mp_sigpending are bitmaps, in which each bit represents one of the signals that can be sent to a process. The type sigset_t is a 32-bit integer, so MINIX 3 could support up to 32 signals. Currently 22 signals are defined, although some are not supported, as permitted by the POSIX standard. Signal 1 is the least significant (rightmost) bit. In any case, POSIX requires standard functions to add or delete members of the signal sets represented by these bitmaps, so all necessary manipulations can be done without the programmer being aware of these details. The array mp_sigact is important for handling signals. An element is provided for each signal type, and each element is a sigaction structure (defined in the file include/signal.h). Each sigaction structure consists of three fields:
This array makes possible a great deal of flexibility in handling signals. The mp_flags field is used to hold a miscellaneous collection of bits, as indicated at the end of the file. This field is an unsigned integer, 16 bits on low-end CPUs or 32 bits on a 386 and up. The next field in the process table is mp_procargs. When a new process is started, a stack like the one shown in Fig. 4-38 is built, and a pointer to the start of the new process' argv array is stored here. This is used by the ps command. For instance, for the example of Fig. 4-38, the value 8164 would be stored here, making it possible for ps to display the command line, ls l f.c g.c if executed while the ls command is active. The mp_swapq field is not used in MINIX 3 as described here. It is used when swapping is enabled, and points to a queue of processes waiting to be swapped. The mp_reply field is where a reply message is built. In earlier versions of MINIX, one such field was provided, defined in glo.h and thus compiled when table.c was compiled. In MINIX 3, a space for building a reply message is provided for every process. Providing a place for a reply in each process table slot allows the PM to go on to handle another incoming message if a reply cannot be sent immediately upon completion of building the reply. The PM cannot handle two requests at once, but it can postpone replies if necessary, and catch up by trying to send all pending replies each time it completes a request. The last two items in the process table might be regarded as frills. Mp_nice provides a place for each process to be assigned a nice value, so users can lower the priority of their processes, for example, to allow one running process to defer to another, more important, one. However, MINIX 3 uses this field internally to provide system processes (servers and drivers) with different priorities, depending upon their needs. The mp_name field is convenient for debugging, to help the programmer identify a process table slot in a memory dump. A system call is available to search the process table for a process name and return a process ID. Finally, note that the process manager's part of the process table is declared as an array of size NR_PROCS (line 17655). Recall that the kernel's part of the process table was declared as an array of size NR_TASKS + NR_PROCS in kernel/proc.h (line 5593). As mentioned previously, processes compiled into the kernel are not known to user space components of the operating system such as the process manager. They are not really first-class processes. The next file is param.h (line 17700), which contains macros for many of the system call parameters contained in the request message. It also contains twelve macros for fields in the reply message, and three macros used only in messages to the file system. For example, if the statement k = m_in.pid; appears in any file in which param.h is included, the C preprocessor converts it to k = m_in.m1_i1; before feeding it to the compiler proper (line 17707). Before we continue with the executable code, let us look at table.c (line 17800). Compilation of this file reserves storage for the various EXTERN variables and structures we have seen in glo.h and mproc.h. The statement #define _TABLE causes EXTERN to become the null string. This is the same mechanism that we saw in the kernel code. As we mentioned earlier, core_name was declared as extern, not EXTERN in glo.h. Now we can see why. Here core_name is declared with an initialization string. Initialization is not possible within an extern definition. The other major feature of table.c is the array call_vec (line 17815). It is also an initialized array, and thus could not be declared as EXTERN in glo.h. When a request message arrives, the system call number is extracted from it and used as an index into call_vec to locate the procedure that carries out that system call. System call numbers that are not valid calls all invoke no_sys, which just returns an error code. Note that although the _PROTOTYPE macro is used in defining call_vec, this is not a declaration of a prototype; it is the definition of an initialized array. However, it is an array of functions, and use of _PROTOTYPE is the easiest way to do this that is compatible with both classic (Kernighan & Ritchie) C and Standard C. A final note on header files: because MINIX 3 is still being actively developed, there are still some rough edges. One of these is that some source files in pm/ include header files from the kernel directory. It may be hard to find some important definitions if you are not aware of this. Arguably definitions used by more than one major component of MINIX 3 should be consolidated into header files in the include/ directory. 4.8.2. The Main ProgramThe PM is compiled and linked independently from the kernel and the file system. Consequently, it has its own main program, which is started up after the kernel has finished initializing itself. The entry point is at line 18041 in main.c. After doing its own initialization by calling pm_init, the PM enters its loop on line 18051. In this loop, it calls get_work to wait for an incoming request message. Then it calls one of its do_XXX procedures via the call_vec table to carry out the request. Finally, it sends a reply, if needed. This construction should be familiar by now: it is the same one used by the I/O tasks. The preceding description is slightly simplified. As mentioned in Chap. 2, notification messages can be sent to any process. These are identified by special values in the call_nr field. In lines 18055 to 18062 a test is made for the two types of notification messages the PM can receive, and special action is taken in these cases. Also, a test is made for a valid call_nr on line 18064 before an attempt is made to carry out a request (on line 18067). Although an invalid request is unlikely, the test is cheap and the consequences of an invalid request would be serious. Another point worth noting is the call to swap_in at line 18073. As we mentioned in the context of proto.h, in MINIX 3 as configured for description in this text this is a dummy call. But if the system is compiled with the full set of source code with swapping enabled, this is where a test is made to see if a process could be swapped in. Finally, although the comment on line 18070 indicates this is where a reply is sent back, that is also a simplification. The call to setreply constructs a reply in the space we mentioned earlier, in the process table entry for the current process. Then in lines 18078 to 18091 of the loop, all entries in the process table are checked and all pending replies that can be sent are sent, skipping over any that cannot be sent at this time. The procedures get_work (line 18099) and setreply (line 18116) handle the actual receiving and sending, respectively. The former does a little trick to make it look like a message from the kernel was actually from the PM itself, since the kernel does not have a process table slot of its own. The latter function does not really send the reply, it sets it up to be sent later, as mentioned above. Initialization of the Process ManagerThe longest procedure in main.c is pm_init, which initializes the PM. It is not used after the system has started running. Even though drivers and servers are compiled separately and run as separate processes, some of them are loaded as part of the boot image by the boot monitor. It is hard to see how any operating system could be started without a PM and a file system, so these components probably will always need to be loaded into memory by the boot monitor. Some device drivers are also loaded as part of the image. Although it is a goal to make as many MINIX 3 drivers as possible independently loadable, it is hard to see, for instance, how to avoid loading some disk driver early in the game. Most of the work of pm_init is to initialize the PM's tables so all of the preloaded processes can run. As noted earlier the PM maintains two important data structures, the hole table (or free memory table) and a part of the process table. We will consider the hole table first. Initialization of memory is complicated. It will be easier to understand the description that follows if we first show how memory is organized when the PM is activated. MINIX 3 provides all the information we need for this. Before the MINIX 3 boot image itself is loaded into memory, the boot monitor determines the layout of available memory. From the boot menu, you can press the ESC key to see the boot parameters. One line in the display shows blocks of unused memory, and looks like this: memory = 800:923e0,100000:3df0000 (After MINIX 3 starts you can also see this information using the sysenv command or the F5 key. The exact numbers you see may be different, of course.) This shows two blocks of free memory. In addition, there are two blocks of used memory. Memory below 0x800 is used for BIOS data and by the master boot record and the bootblock. It really does not matter how it is used, it is not available by the time the boot monitor starts up. The free memory beginning at 0x800 is the "base memory" of IBM-compatible computers. In this example, starting at address 0x800 (2048) there are 0x923e0 (599008) bytes available. Above this is the 640 KB to 1 MB "upper memory area" which is off limits to ordinary programsit is reserved for ROM and dedicated RAM on I/O adapters. Finally, at address 0x100000 (1 MB) there are 0x3df0000 bytes free. This range is commonly referred to as "extended memory." This example indicates the computer has a total of 64 MB of RAM installed. If you have been keeping track of these numbers you will have noticed that the amount of free base memory is less than the 638 KB you might have expected. The MINIX 3 boot monitor loads itself as high as possible in this range, and in this case requires about 52 KB. In this example about 584 KB is really free. This is a good place to note that memory use could be more complicated than is in this example. For instance, one method of running MINIX, not yet ported to MINIX 3 at the time this is being written, uses an MS-DOS file to simulate a MINIX disk. The technique requires loading some components of MS-DOS before starting the MINIX 3 boot monitor. If these are not loaded adjacent to memory regions already in use more than two regions of free memory will be reported by the boot monitor. When the boot monitor loads the boot image into memory information about the image components is displayed on the console screen. Fig. 4-44 shows part of such a display. In this example (typical but possibly not identical to what you will see as this was from a pre-release version of MINIX 3), the boot monitor loaded the kernel into the free memory at address 0x800. The PM, file system, reincarnation server, and other components not shown in the figure are installed in the block of free memory that starts at 1 MB. This was an arbitrary design choice; enough memory remains below the 588 KB limit for some of these components. However, when MINIX 3 is compiled with a large block cache, as is true in this example, the file system cannot fit into the space just above the kernel. It was easier, but by no means essential, just to load everything in the higher region of memory. Nothing is lost by this, the memory manager can make use of the hole in memory below 588 KB once the system is running and user processes are started.
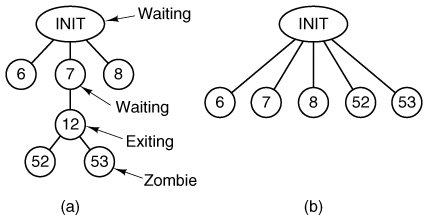
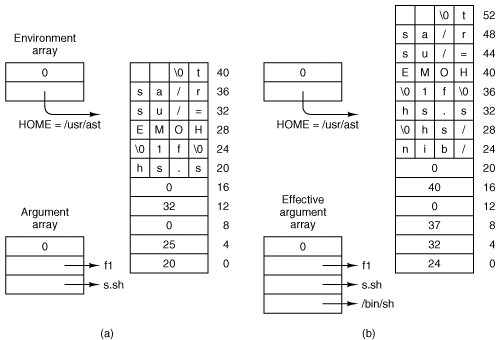
Initialization of the PM starts by looping through the process table to disable the timer for each slot so no spurious alarms can occur. Then global variables that define the default sets of signals that will be ignored or that will cause core dumps are initialized. Next the information we have seen about memory use is processed. On line 18182 the system task retrieves the boot monitor's memory string that we saw above. In our example there are two base:size pairs showing blocks of free memory. The call to get_mem_chunks (line 18184) converts the data in the ASCII string into binary, and enters the base and size values into the array mem_chunks (line 18192) the elements of which are defined as struct memory {phys_clicks base; phys_clicks size;}; Mem_chunks is not the hole list yet, it is just a small array in which this information is collected prior to initializing the hole list. After querying the kernel and converting information about kernel memory use into units of clicks, patch_mem_chunks is called to subtract the kernel usage from mem_chunks array. Now memory that was in use before MINIX 3 started is accounted for, as is memory used by the kernel. Mem_chunks is not complete, but memory used by normal processes in the boot image will be accounted for within the loop on lines 18201 to 18239 which initializes process table entries. Information about attributes of all processes that are part of the boot image are in the imag e table that was declared in kernel/table.c (lines 6095 to 6109). Before entering the main loop the sys_getimage kernel call on line 18197 provides the process manager with a copy of the imag e table. (Strictly speaking, this is not exactly a kernel call; it is one of more than a dozen macros defined in include/minix/syslib.h that provide easily-used interfaces to the sys_getinfo kernel call.) Kernel processes are not known in user space and the PM (and FS) parts of the process table do not need initialization for kernel processes. In fact, space is not reserved for kernel process slots. These each have a negative process number (process table index), and they are ignored by the test on line 18202. Also, it is not necessary to call patch_mem_chunks for kernel processes; the allowance made for the kernel's memory use also takes care of the tasks that are compiled into the kernel. System processes and user processes need to be added to the process table, although they get slightly different treatments (lines 18210 to 18219). The only user process loaded in the boot image is init, thus a test is made for INIT_PROC_NR (line 18210). All of the other processes in the boot image are system processes. System processes are specialthey cannot be swapped, they each have a dedicated slot in the priv table in the kernel, and they have special privileges as indicated by their flags. For each process, the proper defaults are set for signal processing (with some differences between the defaults for system processes and init). Then the memory map of each process is obtained from the kernel, using get_mem_map, which ultimately invokes the sys_getinfo kernel call, and patch_mem_chunks is called to adjust the mem_chunks array (lines 18225 to 18230) accordingly. Finally, a message is sent to the file system so an entry for each process can be initialized in the FS part of the process table (lines 18233 to 18236). The message contains only the process number and the PID; this is sufficient to initialize the FS process table slot, as all the processes in the system boot image belong to the superuser and can be given the same default values. Each message is dispatched with a send operation, so no reply is expected. After sending the message the name of the process is displayed on the console (line 18237): Building process table: pm fs rs tty memory log driver init In this display driver is a stand-in for the default disk driver; multiple disk drivers may be compiled into the boot image, with one selected as the default by a label= assignment in the boot parameters. The PM's own process table entry is a special case. After the main loop is complete the PM makes some changes to its own entry and then sends a final message to the file system with a symbolic value of NONE as the process number. This message is sent with a sendrec call, and the process manager blocks expecting a response. While the PM has been looping through the initialization code the file system has been executing a receive loop (on lines 24189 to 24202, if you want to peek at code to be described in the next chapter). Receiving the message with process number NONE tells the FS that all system processes have been initialized, so it can exit its loop and send a synchronization message to unblock the PM. Now the FS is free to continue its own initialization, and here in the PM initialization is also almost complete. On line 18253, mem_init is called. This function takes the information that has been collected in the mem_chunks array and initializes the linked list of free memory regions and related variables that will be used for memory management once the system is running. Normal memory management begins after printing a message on the console listing total memory, memory in use by MINIX 3, and available memory: Physical memory: total 63996 KB, system 12834 KB, free 51162 KB. The next function is get_nice_value (line 18263). It is called to determine the "nice level" of each process in the boot image. The image table provides a queue value for each boot image process which defines on which priority queue the process will be scheduled. These range from 0 for high priority processes like CLOCK to 15 for IDLE. But the traditional meaning of "nice level" in UNIX systems is a value that can be either positive or negative. Thus get_nice_value scales the kernel priority values on a scale centered on zero for user processes. This is done using constants defined as macros in include/sys/resource.h (not listed), PRIO_MIN and PRIO_MAX, with values of -20 and +20. These are scaled between MIN_USER_Q and MAX_USER_Q, defined in kernel/proc.h, so if a decision is made to provide fewer or more scheduling queues the nice command will still work. Init, the root process in the user process tree, is scheduled in priority queue 7 and receives a "nice" value of 0, which is inherited by a child after a fork. The last two functions contained in main.c have already been mentioned in passing. Get_mem_chunks (line 18280) is called only once. It takes the memory information returned by the boot monitor as an ASCII string of hexadecimal base:size pairs, converts the information into units of clicks, and stores the information in the mem_chunks array. Patch_mem_chunks (line 18333) continues building the free memory list, and is called several times, once for the kernel itself and once for init and each of the system processes initialized during the main loop of pm_init. It corrects the raw boot monitor information. Its job is easier because it gets its data in click units. For each process, pm_init is passed the base and size of the text and data allocations for that process. For each process, the base of the last element in the array of free blocks is increased by the sum of the lengths of the text and data segments. Then the size of that block is decreased by the same amount to mark the memory for that process as in use. 4.8.3. Implementation of FORK, EXIT, and WAITThe fork, exit, and wait system calls are implemented by the procedures do_fork, do_pm_exit, and do_waitpid in the file forkexit.c. The procedure do_fork (line 18430) follows the steps shown in Fig. 4-36. Notice that the second call to proc s_in_use (line 18445) reserves the last few process table slots for the superuser. In computing how much memory the child needs, the gap between the data and stack segments is included, but the text segment is not. Either the parent's text is shared, or, if the process has common I and D space, its text segment is of zero length. After doing the computation, a call is made to alloc_mem to get the memory. If this is successful, the base addresses of child and parent are converted from clicks into absolute bytes, and sys_copy is called to send a message to the system task to get the copying done. Now a slot is found in the process table. The test involving procs_in_use earlier guarantees that one will exist. After the slot has been found, it is filled in, first by copying the parent's slot there, and then updating the fields mp_parent, mp_flags, mp_child_utime, mp_child_stime, mp_seg, mp_exitstatus, and mp_sigstatus. Some of these fields need special handling. Only certain bits in the mp_flags field are inherited. The mp_seg field is an array containing elements for the text, data, and stack segments, and the text portion is left pointing to the parent's text segment if the flags indicate this is a separate I and D program that can share text. The next step is assigning a PID to the child. The call to get_free_pid does what its name indicates. This is not as simple as one might think, and we will describe the function further on. Sys_fork and tell_fs inform the kernel and file system, respectively, that a new process has been created, so they can update their process tables. (All the procedures beginning with sys_ are library routines that send a message to the system task in the kernel to request one of the services of Fig. 2-45.) Process creation and destruction are always initiated by the PM and then propagated to the kernel and file system when completed. The reply message to the child is sent explicitly at the end of do_fork. The reply to the parent, containing the child's PID, is sent by the loop in main, as the normal reply to a request. The next system call handled by the PM is exit. The procedure do_pm_exit (line 18509) accepts the call, but most of the work is done by the call to pm_exit, a few lines further down. The reason for this division of labor is that pm_exit is also called to take care of processes terminated by a signal. The work is the same, but the parameters are different, so it is convenient to split things up this way. The first thing pm_exit does is to stop the timer, if the process has one running. Then the time used by the child is added to the parent's account. Next, the kernel and file system are notified that the process is no longer runnable (lines 18550 and 18551). The sys_exit kernel call sends a message to the system task telling it to clear the slot used by this process in the kernel's process table. Next the memory is released. A call to find_share determines whether the text segment is being shared by another process, and if not the text segment is released by a call to free_mem. This is followed by another call to the same procedure to release the data and stack. It is not worth the trouble to decide whether all the memory could be released in one call to free_mem. If the parent is waiting, cleanup is called to release the process table slot. If the parent is not waiting, the process becomes a zombie, indicated by the ZOMBIE bit in the mp_flags word, and the parent is sent a SIGCHILD signal. Whether the process is completely eliminated or made into a zombie, the final action of pm_exit is to loop through the process table and look for children of the process it has just terminated (lines 18582 to 18589). If any are found, they are disinherited and become children of init. If init is waiting and a child is hanging, cleanup is then called for that child. This deals with situations such as the one shown in Fig. 4-45(a). In this figure we see that process 12 is about to exit, and that its parent, 7, is waiting for it. Cleanup will be called to get rid of 12, so 52 and 53 are turned into children of init, as shown in Fig. 4-45(b). Now we have the situation that 53, which has already exited, is the child of a process doing a wait. Consequently, it can also be cleaned up. Figure 4-45. (a) The situation as process 12 is about to exit. (b) The situation after it has exited. When the parent process does a wait or a waitpid, control comes to procedure do_waitpid on line 18598. The parameters supplied by the two calls are different, and the actions expected are also different, but the setup done in lines 18613 to 18615 prepares internal variables so do_waitpid can perform the actions of either call. The loop on lines 18623 to 18642 scans the entire process table to see if the process has any children at all, and if so, checks to see if any are zombies that can now be cleaned up. If a zombie is found (line 18630), it is cleaned up and do_waitpid returns the SUSPEND return code. If a traced child is found, the reply message being constructed is modified to indicate the process is stopped, and do_waitpid returns. If the process doing the wait has no children, it simply receives an error return (line 18653). If it has children, but none are zombies or are being traced, a test is made to see if do_waitpid was called with a bit set indicating the parent did not want to wait. If not (the usual case), then a bit is set on line 18648 to indicate that it is waiting, and the parent is suspended until a child terminates. When a process has exited and its parent is waiting for it, in whichever order these events occur, the procedure cleanup (line 18660) is called to perform the last rites. Not much remains to be done by this point. The parent is awakened from its wait or waitpid call and is given the PID of the terminated child, as well as its exit and signal status. The file system has already released the child's memory, and the kernel has already suspended scheduling and freed up the child's slot in the process table. At this point, the child process is gone forever. 4.8.4. Implementation of EXECThe code for exec follows the outline of Fig. 4-40. It is contained in the procedure do_exec (line 18747) in exec.c. After making a few validity checks, the PM fetches the name of the file to be executed from user space (lines 18773 to 18776). Recall that the library procedures which implement exec build a stack within the old core image, as we saw in Fig. 4-38. This stack is fetched into the PM's memory space next (line 18782). The next few steps are written as a loop (lines 18789 to 18801). However, for ordinary binary executables only one pass through the loop takes place. We will first describe this case. On line 18791 a message to the file system switches to the user's directory so the path to the file will be interpreted relative to the user's, rather than to PM's, working directory. Then allowed is calledif execution is allowed it opens the file. If the test fails a negative number is returned instead of a valid file descriptor, and do_exit terminates indicating failure. If the file is present and executable, the PM calls read_header and gets the segment sizes. For an ordinary binary the return code from read_header will cause an exit from the loop at line 18800. Now we will look at what happens if the executable is a script. MINIX 3, like most UNIX-like operating systems, supports executable scripts. Read_header tests the first two bytes of the file for the magic shebang (#!) sequence and returns a special code if this is found, indicating a script. The first line of a script marked this way specifies the interpreter for the script, and possibly also specifies flags and options for the interpreter. For instance, a script can be written with a first line like #! /bin/sh to show it is to be interpreted by the Bourne shell, or #! /usr/local/bin/perl wT to be interpreted with Perl with flags set to warn of possible problems. This complicates the job of exec, however. When a script is to be run, the file that do_exec must load into memory is not the script itself. Instead the binary for the interpreter must be loaded. When a script is identified patch_stack is called on line 18801 at the bottom of the loop. What patch_stack does can be illustrated by an example. Suppose that a Perl script is called with a few arguments on the command line, like this: perl_prog.pl file1 file2 If the perl script was written with a shebang line similar to the one we saw above patch_stack creates a stack to execute the perl binary as if the command line were: /usr/local/bin/perl -wT perl_prog.pl file1 file2 If it is successful in this, the first part of this line, that is, the path to the binary executable of the interpreter, is returned. Then the body of the loop is executed once more, this time reading the file header and getting the segment sizes of the file to be executed. It is not permitted for the first line of a script to point to another script as its interpreter. That is why the variable r is used. It can only be incremented once, allowing only one chance to call patch_stack. If on the second time through the loop the code indicating a script is encountered, the test on line 18800 will break the loop. The code for a script, represented symbolically as ESCRIPT, is a negative number (defined on line 18741). In this case the test on line 18803 will cause do_exit to return with an error code telling whether the problem is a file that canot be executed or a command line that is too long. Some work remains to be done to complete the exec operation. Find_share checks to see if the new process can share text with a process that is already running (line 18809), and new_mem allocates memory for the new image and releases the old memory. Both the image in memory and the process table need to be made ready before the exec-ed program can run. On lines 18819 to 18821 the executable file's i-node, filesystem, and modification time are saved in the process table. Then the stack is fixed up as in Fig. 4-38(c) and copied to the new image in memory. Next the text (if not already sharing text) and data segments are copied from the disk to the memory image by calling rw_seg (lines 18834 to 18841). If the setuid or setgid bits are set the file system needs to be notified to put the effective id information into the FS part of process table entry (lines 18845 to 18852). In the PM's part of the file table a pointer to the arguments to the new program is saved so the ps command will be able to show the command line, signal bitmasks are initialized, the FS is notified to close any file descriptors that should be closed after an exec, and the name of the command is saved for display by ps or during debugging (lines 18856 to 18877). Usually, the last step is to tell the kernel, but if tracing is enabled a signal must be sent (lines 18878 to 18881). In describing the work of do_exec we mentioned a number of supporting functions provided in exec.c. Read_header (line 18889) not only reads the header and returns the segment sizes, it also verifies that the file is a valid MINIX 3 executable for the same CPU type as the operating system is compiled for. The constant value A_I80386 on line 18944 is determined by a #ifdef ... #endif sequence at compile time. Binary executable programs for 32-bit MINIX 3 on Intel platforms must have this constant in their headers to be acceptable. If MINIX 3 were to be compiled to run in 16-bit mode the value here would be A_I8086. If you are curious, you can see values defined for other CPUs in include/a.out.h. Procedure new_mem (line 18980) checks to see if sufficient memory is available for the new memory image. It searches for a hole big enough for just the data and stack if the text is being shared; otherwise it searches for a single hole big enough for the combined text, data, and stack. A possible improvement here would be to search for two separate holes. In earlier versions of MINIX it was required that the text and data/stack segments be contiguous, but this is not necessary in MINIX 3. If sufficient memory is found, the old memory is released and the new memory is acquired. If insufficient memory is available, the exec call fails. After the new memory is allocated, new_mem updates the memory map (in mp_seg) and reports it to the kernel with the sys_newmap kernel call. The final job of new_mem is to zero the bss segment, gap, and stack segment. (The bss segment is that part of the data segment that contains all the uninitialized global variables.) The work is done by the system task, called by sys_memset at line 19064. Many compilers generate explicit code to zero the bss segment, but doing it here allows MINIX 3 to work even with compilers that do not. The gap between data and stack segments is also zeroed, so that when the data segment is extended by brk, the newly acquired memory will contain zeroes. This is not only a convenience for the programmer, who can count on new variables having an initial value of zero, it is also a security feature on a multiuser operating system, where a process previously using this memory may have been using data that should not be seen by other processes. The next procedure, patch_ptr (line 19074), relocates pointers like those of Fig. 4-38(b) to the form of Fig. 4-38(c). The work is simple: examine the stack to find all the pointers and add the base address to each one. The next two functions work together. We described their purpose earlier. When a script is exec-ed the binary for the interpreter of the script is the executable that must be run. Insert_arg (line 19106) inserts strings into the PM copy of the stack. This is directed by patch_stack (line 19162), which finds all of the strings on the shebang line of the script, and call s insert_arg. The pointers have to be corrected, too, of course. Insert_arg's job is straightforward, but there are a number of things that can go wrong and must be tested. This is a good place to mention that checking for problems when dealing with scripts is particularly important. Scripts, after all, can be written by users, and all computer professionals recognize that users are often the major cause of problems. But, seriously, a major difference between a script and a compiled binary is that you can generally trust the compiler to have refused to produce output for a wide range of errors in the source code. A script is not validated this way. Fig. 4-46 shows how this would work for a call to a shell script, s.sh, which operates on a file f1. The command line looks like this: s.sh f1 Figure 4-46. (a) Arrays passed to execve and the stack created when a script is executed. (b) After processing by patch_stack, the arrays and the stack look like this. The script name is passed to the program which interprets the script. |
System call | Purpose |
|---|---|
sigaction | Modify response to future signal |
sigprocmask | Change set of blocked signals |
kill | Send signal to another process |
alarm | Send ALRM signal to self after delay |
pause | Suspend self until future signal |
sigsuspend | Change set of blocked signals, then PAUSE |
sigpending | Examine set of pending (blocked) signals |
sigreturn | Clean up after signal handler |
The sigaction system call supports the sigaction and signal functions, which allow a process to alter how it will respond to signals. Sigaction is required by POSIX and is the preferred call for most purposes, but the signal library function is required by Standard C, and programs that must be portable to non-POSIX systems should be written using it. The code for do_sigaction (line 19544) begins with checks for a valid signal number and verification that the call is not an attempt to change the response to a sigkill signal (lines 19550 and 19551). (It is not permitted to ignore, catch, or block sigkill. Sigkill is the ultimate means by which a user can control his processes and a system manager can control his users.) Sigaction is called with pointers to a sigaction structure, sig_osa, which receives the old signal attributes that were in effect before the call, and another such structure, sig_nsa, containing a new set of attributes.
The first step is to call the system task to copy the current attributes into the structure pointed to by sig_osa. Sigaction can be called with a NULL pointer in sig_nsa to examine the old signal attributes without changing them. In this case do_sigaction returns immediately (line 19560). If sig_nsa is not NULL, the structure defining the new signal action is copied to the PM's space.
The code in lines 19567 to 19585 modifies the mp_catch, mp_ignore, and mp_sigpending bitmaps according to whether the new action is to be to ignore the signal, to use the default handler, or to catch the signal. The sa_handler field of the sigaction structure is used to pass a pointer to the procedure to the function to be executed if a signal is to be caught, or one of the special codes SIG_IGN or SIG_DFL, whose meanings should be clear if you understand the POSIX standards for signal handling discussed earlier. A special MINIX 3-specific code, SIG_MESS is also possible; this will be explained below.
The library functions sigaddset and sigdelset are used, to modify the signal bitmaps, although the actions are straightforward bit manipulation operations that could have been implemented with simple macros. However, these functions are required by the POSIX standard in order to make programs that use them easily portable, even to systems in which the number of signals exceeds the number of bits available in an integer. Using the library functions helps to make MINIX 3 itself easily portable to different architectures.
We mentioned a special case above. The SIG_MESS code detected on line 19576 is available only for privileged (system) processes. Such processes are normally blocked, waiting for request messages. Thus the ordinary method of receiving a signal, in which the PM asks the kernel to put a signal frame on the recipients stack, will be delayed until a message wakes up the recipient. A SIG_MESS code tells the PM to deliver a notification message, which has higher priority than normal messages. A notification message contains the set of pending signals as an argument, allowing multiple signals to be passed in one message.
Finally, the other signal-related fields in the PM's part of the process table are filled in. For each potential signal there is a bitmap, the sa_mask, which defines which signals are to be blocked while a handler for that signal is executing. For each signal there is also a pointer, sa_handler. It can contain a pointer to the handler function, or special values to indicate the signal is to be ignored, handled in the default way, or used to generate a message. The address of the library routine that invokes sigreturn when the handler terminates is stored in mp_sigreturn. This address is one of the fields in the message received by the PM.
POSIX allows a process to manipulate its own signal handling, even while within a signal handler. This can be used to change signal response to subsequent signals while a signal is being processed, and then to restore the normal set of responses. The next group of system calls support these signal-manipulation features. Sigpending is handled by do_sigpending (line 19597), which returns the mp_sigpending bitmap, so a process can determine if it has pending signals. Sigprocmask, handled by do_sigprocmask, returns the set of signals that are currently blocked, and can also be used to change the state of a single signal in the set, or to replace the entire set with a new one. The moment that a signal is unblocked is an appropriate time to check for pending signals, and this is done by calls to check_pending on line 19635 and line 19641. Do_sigsuspend (line 19657) carries out the sigsuspend system call. This call suspends a process until a signal is received. Like the other functions we have discussed here, it manipulates bitmaps. It also sets the sigsuspended bit in mp_flags, which is all it takes to prevent execution of the process. Again, this is a good time to make a call to check_pending. Finally, do_sigreturn handles sigreturn, which is used to return from a custom handler. It restores the signal context that existed when the handler was entered, and it also calls check_pending on line 19682.
When a user process, such as the kill command, invokes the kill system call, the PM's do_kill function (line 19689) is invoked. A single call to kill may require delivery of signals to a group of several processes, and do_kill just calls check_sig, which checks the entire process table for eligible recipients.
Some signals, such as sigint, originate in the kernel itself. Ksig_pending (line 19699) is activated when a message from the kernel about pending signals is sent to the PM. There may be more than one process with pending signals, so the loop on lines 19714 to 19722 repeatedly asks the system task for a pending signal, passes it on to handle_sig, and then tells the system task it is done, until there are no more processes with signals pending. The messages come with a bitmap, allowing the kernel to generate multiple signals with one message. The next function, handle_sig, processes the bitmap one bit at a time on lines 19750 to 19763. Some kernel signals need special attention: the process ID is changed in some cases to cause the signal to be delivered to a group of processes (lines 19753 to 19757). Otherwise, each set bit results in a call to check_sig, just as in do_kill.
Alarms and Timers
The alarm system call is handled by do_alarm (line 19769). It calls the next function, set_alarm, which is a separate function because it is also used to turn off a timer when a process exits with a timer still on. This is done by calling set_alarm with an alarm time of zero. Set_alarm does its work with timers maintained within the process manager. It first determines if a timer is already set on behalf of the requesting process, and if so, whether it has expired, so the system call can return the time in seconds remaining on a previous alarm, or zero if no timer was set. A comment within the code explains some problems with dealing with long times. Some rather ugly code on line 19918 multiplies the argument to the call, a time in seconds, by the constant HZ, the number of clock ticks per second, to get a time in tick units. Three casts are needed to make the result the correct clock_t data type. Then on the next line the calculation is reversed with ticks cast from clock_t to unsigned long. The result is compared with a cast of the original alarm time argument cast to unsigned long. If they are not equal it means the requested time resulted in a number that was out of range of one of the data types used, and a value which means "never" is substituted. Finally, either pm_set_timer or pm_cancel_timer is called to add or remove a timer from the process manager's timer queue. The key argument to the former call is cause_sigalarm, the watchdog function to be executed when the timer expires.
Any interaction with the timer maintained in kernel space is hidden in the calls to the pm_XXX_timer routines. Every request for an alarm that eventually culminates in an alarm will normally result in a request to set a timer in kernel space. The only exception would be if more than one request for a timeout at the exact same time were to occur. However, processes may cancel their alarms or terminate before their alarms expire. A kernel call to request setting a timer in kernel space only needs to be made when there is a change to the timer at the head of the process manager's timer queue.
Upon expiration of a timer in the kernel-space timer queue that was set on behalf of the PM, the system task announces the fact by sending the PM a notification message, detected as type SYN_ALARM by the main loop of the PM. This results in a call to pm_expire_timers, which ultimately results in execution of the next function, cause_sigalrm.
Cause_sigalarm (line 19935) is the watchdog, mentioned above. It gets the process number of the process to be signaled, checks some flags, resets the ALARM_ON flag, and calls check_sig to send the SIGALRM signal.
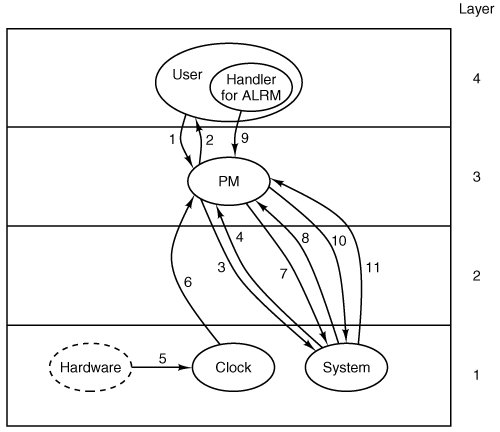
The default action of the SIGALRM signal is to kill the process if it is not caught. If the SIGALRM is to be caught, a handler must be installed by sigaction. Fig. 4-48 shows the complete sequence of events for a SIGALRM signal with a custom handler. The figure shows that three sequences of messages occur. First, in message (1) the user does an alarm call via a message to the PM. At this point the process manager sets up a timer in the queue of timers it maintains for user processes, and acknowledges with message (2). Nothing more may happen for a while. When the timer for this request reaches the head of the PM's timer queue, because timers ahead of it have expired or have been cancelled, message (3) is sent to the system task to have it set up a new kernel-space timer for the process manager, and is acknowledged by message (4). Again, some time will pass before anything more happens. But after this timer reaches the head of the kernel-space timer queue the clock interrupt handler will find it has expired. The remaining messages in the sequence will follow quickly. The clock interupt handler sends a HARD_INT message (5) to the clock task, which causes it to run and update its timers. The timer watchdog function, cause_alarm, initiates message (6), a notification to the PM. The PM now updates its timers, and after determining from its part of the process table that a handler is installed for SIGALRM in the target process, sends message (7) to the system task to have it do the stack manipulations needed to send the signal to the user process. This is acknowledged by message (8). The user process will be scheduled and will execute the handler, and then will make a sigreturn call (9) to the process manager. The process manager then sends message (10) to the system task to complete the cleanup, and this is acknowledged by message (11). Not shown in this diagram is another pair of messages from the PM to the system task to get the uptime, made before message (3).
Figure 4-48. Messages for an alarm. The most important are: (1) User does alarm. (3) PM asks system task to set timer. (6) Clock tells PM time has expired. (7) PM requests signal to user. (9) Handler terminates with call to sigreturn. See text for details.
The next function, do_pause, takes care of the pause system call (line 19853). It isn't really related to alarms and timers, although it can be used in a program to suspend execution until an alarm (or some other signal) is received. All that is necessary is to set a bit and return the SUSPEND code, which causes the main loop of the PM to refrain from replying, thus keeping the caller blocked. The kernel need not even be informed, since it knows that the caller is blocked.
Support Functions for Signals
Several support functions in signal.c have been mentioned in passing. We will now look at them in more detail. By far the most important is sig_proc (line 19864), which actually sends a signal. First a number of tests are made. Attempts to send to dead or zombie processes are serious problems that cause a system panic (lines 19889 to 19893). A process that is currently being traced is stopped when signaled (lines 19894 to 19899). If the signal is to be ignored, sig_proc's work is complete on line 19902. This is the default action for some signals, for instance, those signals that are required to be there by POSIX but do not have to (and are not) supported by MINIX 3. If the signal is blocked, the only action that needs to be taken is to set a bit in that process' mp_sigpending bitmap. The key test (line 19910) is to distinguish processes that have been enabled to catch signals from those that have not. With the exception of signals that are converted into messages to be sent to system services all other special considerations have been eliminated by this point and a process that cannot catch the signal must be terminated.
First we will look at the processing of signals that are eligible to be caught (lines 19911 to 19950). A message is constructed to be sent to the kernel, some parts of which are copies of information in the PM's part of the process table. If the process to be signaled was previously suspended by sigsuspend, the signal mask that was saved at the time of suspension is included in the message; otherwise the current signal mask is included (line 19914). Other items included in the message are several addresses in the space of the signaled process space: the signal handler, the address of the sigreturn library routine to be called on completion of the handler, and the current stack pointer.
Next, space is allocated on the process' stack. Figure 4-49 shows the structure that is put on the stack. The sigcontext portion is put on the stack to preserve it for later restoration, since the corresponding structure in the process table itself is altered in preparation for execution of the signal handler. The sigframe part provides a return address for the signal handler and data needed by sigreturn to complete restoration of the process' state when the handler is done. The return address and frame pointer are not actually used by any part of MINIX 3. They are there to fool a debugger if anyone should ever try to trace execution of a signal handler.
Figure 4-49. The sigcontext and sigframe structures pushed on the stack to prepare for a signal handler. The processor registers are a copy of the stackframe used during a context switch. (This item is displayed on page 468 in the print version)
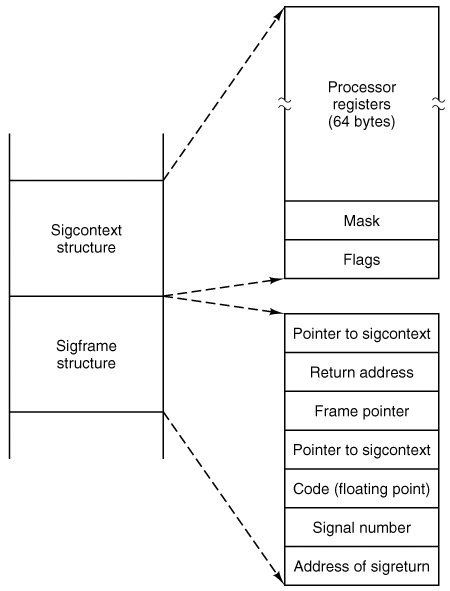
The structure to be put on the signaled process' stack is fairly large. The code in lines 19923 and 19924 reserves space for it, following which a call to adjust tests to see whether there is enough room on the process' stack. If there is not enough stack space, the process is killed by jumping to the label doterminate using the seldom-usedC goto (lines 19926 and 19927).
The call to adjust has a potential problem. Recall from our discussion of the implementation of brk that adjust returns an error if the stack is within SAFETY_BYTES of running into the data segment. The extra margin of error is provided because the validity of the stack can only be checked occasionally by software. This margin of error is probably excessive in the present instance, since it is known exactly how much space is needed on the stack for the signal, and additional space is needed only for the signal handler, presumably a relatively simple function. It is possible that some processes may be terminated unnecessarily because the call to adjust fails. This is certainly better than having programs fail mysteriously at other times, but finer tuning of these tests may be possible at some time in the future.
If there is enough room on the stack for the struct, two more flags are checked. The SA_NODEFER flag indicates if the signaled process is to block further signals of the same type while handling a signal. The SA_RESETHAND flag tells if the signal handler is to be reset upon receiving this signal. (This provides faithful emulation of the old signal call. Although this "feature" is often considered a fault in the old call, support of old features requires supporting their faults as well.) The kernel is then notified, using the sys_sigsend kernel call (line 19940) to put the sigframe on the stack. Finally, the bit indicating that a signal is pending is cleared, and unpause is called to terminate any system call on which the process may be hanging. When the signaled process next executes, the signal handler will run. If for some reason all of the tests above failed, the PM panics (line 19949).
The exception mentioned abovesignals converted into messages for system servicesis tested for on line 19951, and carried out by the sys_kill kernel call that follows. This causes the system task to send a notification message to the signaled process. Recall that, unlike most other notifications, a notification from the system task carries a payload in addition to the basic information about its origin and a timestamp. It also transmits a bitmap of signals, so the signaled system process learns of all pending signals. If the sys_kill call fails, the PM panics. If it succeeds sig_proc returns (line 19954). If the test on line 19951 failed, execution falls through to the doterminate label.
Now let us look at the termination code marked by the label doterminate (line 19957). The label and a goto are the easiest way to handle the possible failure of the call to adjust. Here signals are processed that for one reason or another cannot or should not be caught. It is possible that the signal was one to be ignored, in which case sig_proc just returns. Otherwise the process must be terminated. The only question is whether a core dump is also needed. Finally, the process is terminated as if it had exited, through a call to pm_exit (line 19967).
Check_sig (line 19973) is where the PM checks to see if a signal can be sent. The call
kill(0, sig);
causes the indicated signal to be sent to all the processes in the caller's group (i.e., all the processes started from the same terminal). Signals originating in the kernel and the reboot system call also may affect multiple processes. For this reason, check_sig loops on lines 19996 to 20026 to scan through the process table to find all the processes to which a signal should be sent. The loop contains a large number of tests. Only if all of them are passed is the signal sent, by calling sig_proc on line 20023.
Check_pending (line 20036) is another important function called several times in the code we have just reviewed. It loops through all the bits in the mp_sigpending bitmap for the process referred to by do_sigmask, do_sigreturn, or do_sigsuspend, to see if any blocked signal has become unblocked. It calls sig_proc to send the first unblocked pending signal it finds. Since all signal handlers eventually cause execution of do_sigreturn, this code suffices eventually to deliver all pending unmasked signals.
The procedure unpause (line 20065) has to do with signals that are sent to processes suspended on pause, wait, read, write, or sigsuspend calls. Pause, wait, and sigsuspend can be checked by consulting the PM's part of the process table, but if none of these are found, the file system must be asked to use its own do_unpause function to check for a possible hangup on read or write. In every case the action is the same: an error reply is sent to the waiting call and the flag bit that corresponds to the cause of the wait is reset so the process may resume execution and process the signal.
The final procedure in this file is dump_core (line 20093), which writes core dumps to the disk. A core dump consists of a header with information about the size of the segments occupied by a process, a copy of all the process' state information, obtained by copying the kernel process table information for the process, and the memory image of each of the segments. A debugger can interpret this information to help the programmer determine what went wrong during execution of the process.
The code to write the file is straightforward. The potential problem mentioned in the previous section again raises its head, but in a somewhat different form. To be sure the stack segment to be recorded in the core dump is up to date, adjust is called on line 20120. This call may fail because of the safety margin built into it. The success of the call is not checked by dump_core, so the core dump will be written in any case, but within the file the information about the stack may be incorrect.
Support Functions for Timers
The MINIX 3 process manager handles requests for alarms from user processes, which are not allowed to contact the kernel or the system task directly themselves. All details of scheduling an alarm at the clock task are hidden behind this interface. Only system processes are allowed to set an alarm timer at the kernel. Support for this is provided in the file timers.c (line 20200).
The process manager maintains a list of requests for alarms, and asks the system task to notify it when it is time for an alarm. When an alarm comes from the kernel the process manager passes it on to the process that should receive it.
Three functions are provided here to support timers. Pm_set_timer sets a timer and adds it to the PM's list of timers, pm_expire_timer checks for expired timers and pm_cancel_timer removes a timer from the PM's list. All three of these take advantage of functions in the timers library, declared in include/-timers.h. The function Pm_set_timer calls tmrs_settimer, pm_expire_timer calls tmrs_exptimers, and pm_cancel_timer calls tmrs_clrtimers. These all manage the business of traversing a linked list and inserting or removing an item, as required. Only when an item is inserted at or removed from the head of the queue does it become necessary to involve the system task in order to adjust the kernelspace timer queue. In such cases each of the pm_XXX_timer functions uses a sys_setalarm kernel call to request help at the kernel level.
4.8.7. Implementation of Other System Calls
The process manager handles three system calls that involve time in time.c: time, stime, and times. They are summarized in Fig. 4-50.
Call | Function |
|---|---|
time | Get current real time and uptime in seconds |
stime | Set the real time clock |
times | Get the process accounting times |
The real time is maintained by the clock task within the kernel, but the clock task itself does not exchange messages with any process except the system task. As a consequence, the only way to get or set the real time is to send a message to the system task. This is, in fact, what do_time (line 20320) and do_stime (line 20341) both do. The real time is measured in seconds since Jan 1, 1970.
Accounting information is also maintained by the kernel for each process. At each clock tick it charges one tick to some process. The kernel doesn't know about parent-child relationships, so it falls to the process manager to accumulate time information for the children of a process. When a child exits, its times are accumulated in the parent's slot in the PM's part of the process table. Do_times (line 20366) retrieves the time usage of a parent process from the system task with a sys_times kernel call, then fills in a reply message with user and system time charged to children.
The file getset.c contains one procedure, do_getset (line 20415), which carries out seven POSIX-required PM system calls. They are shown in Fig. 4-51. They are all so simple that they are not worth an entire procedure each. The getuid and getgid calls both return the real and effective UID or GID.
System Call | Description |
|---|---|
getuid | Return real and effective UID |
getgid | Return real and effective GID |
getpid | Return PIDs of process and its parent |
setuid | Set caller's real and effective UID |
setgid | Set caller's real and effective GID |
setsid | Create new session, return PID |
getpgrp | Return ID of process group |
Setting the uid or gid is slightly more complex than just reading it. A check has to be made to see if the caller is authorized to set the uid or gid. If the caller passes the test, the file system must be informed of the new uid or gid, since file protection depends on it. The setsid call creates a new session, and a process which is already a process group leader is not allowed to do this. The test on line 20463 checks this. The file system completes the job of making a process into a session leader with no controlling terminal.
In contrast to the system calls considered so far in this chapter, the calls in misc.c are not required by POSIX. These calls are necessary because the user-space device drivers and servers of MINIX 3 need support for communication with the kernel that is not necessary in monolithic operating systems. Fig. 4-52 shows these calls and their purposes.
System Call | Description |
|---|---|
do_allocmem | Allocate a chunk of memory |
do_freemem | Deallocate a chunk of memory |
do_getsysinfo | Get info about PM from kernel |
do_getprocnr | Get index to proc table from PID or name |
do_reboot | Kill all processes, tell FS and kernel |
do_getsetpriority | Get or set system priority |
do_svrctrl | Make a process into a server |
The first two are handled entirely by the PM. do_allocmem reads the request from a received message, converts it into click units, and calls alloc_mem. This is used, for example, by the memory driver to allocate memory for the RAM disk. Do_freemem is similar, but calls free_mem.
The next calls usually need help from other parts of the system. They may be thought of as interfaces to the system task. Do_getsysinfo (line 20554) can do several things, depending on the request in the message received. It can call the system task to get information about the kernel contained in the kinfo structure (defined in the file include/minix/type.h). It can also be used to provide the address of the PM's own part of the process table or a copy of the entire process table to another process upon request. The final action is carried out by a call to sys_datacopy (line 20582). Do_getprocnr can find an index into the process table in its own section if given PID, and calls the system task for help if all it has to work with is the name of the target process.
The next two calls, although not required by POSIX, will probably be found in some form in most UNIX-like systems. Do_reboot sends a KILL signal to all processes, and tells the file system to get ready for a reboot. Only after the file system has been synched is the kernel notified with a sys_abort call (line 20667). A reboot may be the result of a panic, or a request from the superuser to halt or restart, and the kernel needs to know which case applies. Do_getsetpriority, supports the famous UNIX nice utility, which allows a user to reduce the priority of a process in order to be a good neighbor to other processes (possibly his own). More importantly, this call is used by the MINIX 3 system to provide fine-grained control of relative priorities of system components. A network or disk device that must handle a rapid stream of data can be given priority over one that receives data more slowly, such as a keyboard. Also, a high-priority process that is stuck in a loop and preventing other processes from running may have its priority lowered temporarily. Changing priority is done by scheduling the process on a lower (or higher) priority queue, as described in the discussion of implementation of scheduling in Chap. 2. When this is initiated by the scheduler in the kernel there is no need to involve the PM, of course, but an ordinary process must use a system call. At the level of the PM it is just a matter of reading the current value returned in a message or generating a message with a new value. A kernel call, sys_nice sends the new value to the system task.
The last function in misc.c is do_svrctl. It is currently used to enable and disable swapping. Other functions once served by this call are expected to be implemented in the reincarnation server.
The last system call we will consider in this chapter is ptrace, handled by trace.c. This file is not listed in Appendix B, but may be found on the CD-ROM and the MINIX 3 Web site. Ptrace is used by debugging programs. The parameter to this call can be one of eleven commands. These are shown in Fig. 4-53. In the PM do_trace processes four of them: T_OK, T_RESUME, I T_EXIT, T_STEP. Requests to enable and exit tracing are completed here. All other commands are passed on to the system task, which has access to the kernel's part of the process table. This is done by calling the sys_trace library function. Two support functions for tracing are provided. Find_proc searches the process table for the process to be traced, and stop_proc stops a traced process when it is signaled.
Command | Description |
|---|---|
T_STOP | Stop the process |
T_OK | Enable tracing by parent for this process |
T_GETINS | Return value from text (instruction) space |
T_GETDATA | Return value from data space |
T_GETUSER | Return value from user process table |
T_SETINS | Set value in instruction space |
T_SETDATA | Set value in data space |
T_SETUSER | Set value in user process table |
T_RESUME | Resume execution |
T_EXIT | Exit |
T_STEP | Set trace bit |
4.8.8. Memory Management Utilities
We will end this chapter by describing briefly two more files which provide support functions for the process manager. These are alloc.c and utility.c. Because internal details of these files are not discussed here, they are not printed in Appendix B (to keep this already fat book from becoming even fatter). However, they are available on the CD-ROM and the MINIX 3 Web site.
Alloc.c is where the system keeps track of which parts of memory are in use and which are free. It has three entry points:
alloc_mem request a block of memory of a given size.
free_mem return memory that is no longer needed.
mem_init initialize the free list when the PM starts running.
As we have said before, alloc_mem uses first fit on a list of holes sorted by memory address. If it finds a piece that is too big, it takes what it needs and leaves the rest on the free list, but reduced in size by the amount taken. If an entire hole is needed, del_slot is called to remove the entry from the free list.
Free_mem's job is to check if a newly released piece of memory can be merged with holes on either side. If it can, merge is called to join the holes and update the lists.
Mem_init builds the initial free list, consisting of all available memory.
The last file to be described is utility.c, which holds a few miscellaneous procedures used in various places in the PM. As with alloc.c, utility.c is not listed in Appendix B.
Get_free_pid finds a free PID for a child process. It avoids a problem that conceivably could occur. The maximum PID value is 30,000. It ought to be the maximum value that can be in PID_t, but this value was chosen to avoid problems with some older programs that use a smaller type. After assigning, say, PID 20 to a very long-lived process, 30,000 more processes might be created and destroyed, and simply incrementing a variable each time a new PID is needed and wrapping around to zero when the limit is reached could bring us back to 20 again. Assigning a PID that was still in use would be a disaster (suppose someone later tried to signal process 20). A variable holding the last PID assigned is incremented and if it exceeds a fixed maximum value, a fresh start is made with PID 2 (because init always has PID 1). Then the whole process table is searched to make sure that the PID to be assigned is not already in use. If it is in use the procedure is repeated until a free PID is found.
The procedure allowed checks to see if a given access is allowed to a file. For example, do_exec needs to know if a file is executable.
The procedure no_sys should never be called. It is provided just in case a user ever calls the PM with an invalid system call number.
Panic is called only when the PM has detected an error from which it cannot recover. It reports the error to the system task, which then brings MINIX 3 to a screeching halt. It is not called lightly.
The next function in utility.c is tell_fs, which constructs a message and sends it to the file system when the latter needs to be informed of events handled by the PM.
Find_param is used to parse the monitor parameters. Its current use is to extract information about memory use before MINIX 3 is loaded into memory, but it could be used to find other information if there were a need.
The next two functions in this file provide interfaces to the library function sys_getproc, which calls the system task to get information from the kernel's part of the process table. Sys_getproc, in turn, is actually a macro defined in include/minix/syslib.h which passes parameters to the sys_getinfo kernel call. Get_mem_map gets the memory map of a process. Get_stack_ptr gets the stack pointer. Both of these need a process number, that is, an index into the process table, which is not the same as a PID. The last function in utility.c is proc_from_pid which provides this supportit is called with a PID and returns an index to the process table.
EAN: 2147483647
Pages: 102