Knowledge-Based Intelligent Support in MAS-Based DLEs
|
| < Day Day Up > |
|
Rule-based reasoning or a knowledge-based system is one of the most successful research topics in AI. Knowledge-based systems have been widely applied to different domains, such as medicine, diagnosis, complex system maintenance, decision-making support, and so on. Undoubtedly, knowledge- based decision-making support is also an important alternative to provide intelligent support for DLEs. It is preferred that DLEs not only be used for distance learning but also for training in complicated and high-cost applications. For example, to deal with the extremely high cost of navigator training in a real navigation environment, applying MAS and AI technologies to design effective DLEs in realistic simulating environments will be highly cost effective. In this section, we discuss how to apply rule-based reasoning techniques to DLEs by introducing an intelligent learning environment for training navigators.
Background
The recent devastating maritime casualties and their environmental impacts, especially the stranding of an EXXON tanker in Alaska, showed that human error in ship navigation is one of the primary factors leading to accidents. In order to reduce maritime accidents and human errors in ship navigation, it is urgently important to improve the skills of navigators and to develop an advanced navigation support system for ship operations. A considerable amount of effort has been paid to the development of advanced navigation support systems. For example, an integrated navigation system (INS) (Kose et al., 1996), which is considered a next-generation navigation system, was developed at Hiroshima University in Japan. This INS incorporates the developed Collision Avoidance Expert System (CAES) (Kose et al., 1995; Yang et al., 1995) as an intelligent decision-making support function to assist the operator in avoiding collision during ship navigation. Furthermore, the most recent collision incident of Canada’s newest high-tech ships warn us that making high-tech ships alone is not sufficient for improving ship navigation safety. It is vital for ship captains to be adequately trained to handle the high- tech ships under various complicated situations. At present, much effort is being spent on developing three-dimensional visualized navigation training systems, which can simulate real-time navigating environments and navigating scenarios. In such an environment, captains are able to obtain realistic experiences navigating ships. Although existing training systems can be a useful means for training navigators, they do not provide decision-making support to trainees or advise the trainee how to make decisions in complicated situations, and it is only shared by a few students in the Lab. To alleviate these shortcomings, Yang et al. (2001) proposed incorporating collision avoidance expert systems and MAS techniques into existing navigation training systems as an intelligent decision-making support system for navigation training.
The proposed intelligent training system, which is a typical MAS-based DLE with knowledge-based decision-making support for ship safety navigation, will enhance and expand the capabilities of the existing navigation training systems in the following areas:
-
Providing intelligent decision-making support for collision and stranding avoidance
-
Providing remote training and multi-user support
-
Providing support for making navigation plans with the help of marine geographical information
Knowledge-Based System for Decision-Making Support
A knowledge-based decision-making support system is a much needed addition to navigation training. To this end, a knowledge-based system was developed in light of experiences obtained from many pilots, using rules-based reasoning. This system aims to assist ship navigators in their decision-making processes to avoid collisions. It is a rule-based knowledge system designed on top of an hierarchical architecture and modularized knowledge structures, as shown in Figure 3. The top layer in the system is the inference control responsible for the control of the inference procedures. The second layer is comprised of the main knowledge bases that consist of the following: classification of target ships, prediction of target ships’ actions, identification of the method of collision avoidance, and establishment of course-line waypoints. The third layer contains knowledge modules of every knowledge base. The fourth layer includes preliminary knowledge modules, such as traffic regulation, identification of target ships, and so on. The system contains the following main inference sequences:
(1) Prediction of target ship’s scheduled action
First, the system uses a knowledge base to classify the navigation environment into one of three categories: open sea, coastal, or route navigation. The prediction of the target ship’s scheduled action depends on this classification. In the case of open sea or coastal navigation, the target will maintain its current course and speed. In the case of route navigation, it will follow the navigating route.
(2) Classification of target ships
After computation of the collision risk of target ships, the target ships are classified as most dangerous, dangerous, restricting, or indifferent. A dangerous ship is defined as a ship having risk of collision that exceeds the safety level when both ships maintain their scheduled course lines. In the case of several dangerous ships, the most dangerous ship has the highest risk among dangerous ships. A restricting ship is defined as a ship that will cause no danger if “own” ship and target ship maintain their scheduled course lines, but it will frustrate the action of own ship if it takes the collision avoidance action for a dangerous ship. The target ship that lies outside the maneuvering space of the own ship is defined as an indifferent ship.
(3) Prediction of target ship’s collision avoidance action according to the classification of the ship
For dangerous ships and restricting ships, their collision avoidance actions are predicted using the same approach and knowledge base as that of the own ship. The predicted actions of collision avoidance of target ships will be incorporated into the procedure when own ship’s action of collision avoidance is formulated.
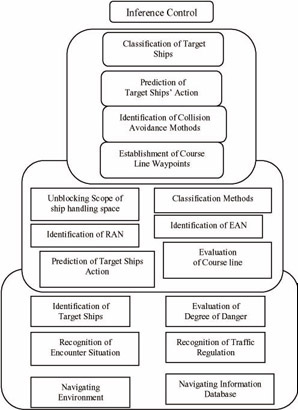
Figure 3: Architecture of the Collision Avoidance Expert System
(4) Establishment of the course-line waypoint as a collision avoidance action
The action of collision avoidance of own ship is formulated basically against the most dangerous ship. The action in the own ship maneuvering space is evaluated considering the prediction of the action of the dangerous ships and the restricting ships. As a result, the most efficient and feasible action is selected.
Infrastructure of MAS-Based DLEs for Navigation Training
The developed knowledge bases were embedded into the agent, which is responsible for making decisions of safety navigation for trainees. As shown in Figure 4, the intelligent navigation training systems provide a distributed training environment in which navigators can learn to handle ships at different locations and different times with the necessary navigation environments. Obviously, this is a MAS-based distributed-learning environment, which provides intelligent decision-making support as well as a multitude of learning objects for students to chose and experience under various navigation environments.
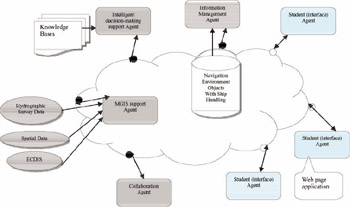
Figure 4: MAS-based infrastructure for navigation training
This MAS-based distributed-learning environment infrastructure consists of the following main agents:
-
Information management agent
-
Intelligent decision-making support agent
-
MGIS support agent
-
Collaboration agent
-
Interface agent
With these agents, the learning environments support the interactions between agents that might be geographically dispersed on the Internet. This distributed training environment provides an online training environment that enables students to acquire knowledge and improve safe navigation skills at any time and from anywhere, simply by using a Java-enabled browser. The following is a brief description for each agent in the DLEs.
Information Management Agent
This agent provides all necessary information for navigation training. The information includes navigational environment such as water depth, surface congestion, weather, ship maneuverability, ship management, etc. The information is stored as training objects. When a student selects a training object, the information management agent will provide all necessary data through the collaboration agent. At the same time, it will also send the training objects to the intelligent decision-making support agent for reasoning.
Interface Agent
The interface agent is responsible for providing interactive operation to students or trainees. A student logs on to the interface agent and selects a necessary training object, the interface agent submits the request to a collaboration agent, and the collaboration agent communicates with the information agent to get all requested data for the interface agents. Once the interface agent downloads all information, it displays instructions on ship handling based on the reasoning results of the decision-making support agent, and it explains the information about decision making and navigational environment to the student. Such information explanation also contains marine geographical information provided by a MGIS support agent.
Collaboration Agent
The collaboration agent coordinates communication, balances workloads for each information agent, and monitors the agent’s performance. It also manages training records for each trainee.
MGIS support Agent
The MGIS support agent is a decision support module that provides navigational information based on spatial analysis. ECDIS is a real-time GIS on board vessels, specifically designed for navigation safety. MGIS for restricted waters, such as a harbor area, can be established by using, for example, a Swath- sounding Sonar System to transmit digitized hydrographic survey data to update the sounding data of scanned paper charts or existing ECDIS. The SDSS (spatial decision support system) was developed for navigation safety decisions based on ECDIS. The roles of ECDIS in MGIS for navigation safety and decision support are described as follows:
-
Internationally adopted maritime Spatial Database—S57 ENC
The database used in ECDIS is S57 ENC (electronic navigational chart). This is more than just a replica of paper charts. The information content and intelligence coded in the S57 ENC, especially the international support provided by the Hydrographic Society, have made it a basis and the only choice for a maritime spatial database. It is in a vector data model with chain-node topology. The object classes and attributes defined in the S57 standard cover essentially all hydrographic features, including time- varying objects such as tides and currents. The object classes for encoding meteorological information are designed by IMO and IHO (International Hydrographic Office).
-
Onboard GIS functionality
GIS (geographic information system) is a decision support system providing information based on spatial analysis. ECDIS is a real-time GIS onboard the vessel, specifically designed for navigation safety. Basic functions include route planning, route checking, and route monitoring (antigrounding, deviation alarm, danger alarm, intrusion alarm, etc.). The information coded in the ENC can be queried and analyzed by cursor pointing, by user-defined areas, or by ship domain, from the vessel’s current position and predicted position.
-
Central display and information system-user interface to mariners
Presentation (symbolization, color, and content) of the data is in conformance with international standards (IHO S52 IEC61174 and IMO resolution A.817). ECDIS is already considered as a central display and information system in the integrated bridge system.
Intelligent Decision-Making Support Agent
The developed knowledge-based systems are embedded into this agent as an intelligent decision-making support agent, which makes decisions based on the selected navigation training object by inferring to knowledge bases. The inferring result informs the interface agent, while the intelligent support information shows students how to handle the ship in different ship-handling scenarios, with clear explanations. The main decision-making support information or function includes the target ship classification, the encounter situation on the scheduled course line, the risk distribution around the scheduled course line, and the recommended action for collision avoidance. Following are their brief descriptions:
(1) Target ship classification
Each target ship is classified as a dangerous ship, restricting ship, or indifferent ship in terms of its risk. A dangerous ship is one that can potentially cause a collision if both ships maintain their current speeds and courses; a restricting ship is one that prevents own ship from performing any action for collision avoidance; and an indifferent ship offers no threat, whatever alteration of course own ship makes.
(2) Encounter situation on the scheduled course line
This support information indicates the encounter type between a dangerous or a restricting ship and own ship, such as overtaking, and so on. Using such supporting information, the trainee may easily classify the encounter relation between two ships by taking one look at the CRT.
(3) Risk distribution around the scheduled course line
This support information is aimed at helping the trainee to analyze the risk situation around a scheduled course line. In real navigation, the ship has a destination and scheduled plan. The captain hopes to keep the ship following the scheduled plan and not deviate very far from it. Figure 5 shows such support information.
(4) Recommendation of collision avoidance action
The above support information is useful for the trainee to use to master and analyze the risk situation around the scheduled course line. However, the final action for collision avoidance needs to be decided by the trainee or instructor. It is desirable for the training system to be able to recommend a proper maneuvering action for collision avoidance in order to instruct the trainee on how to determine an effective action in case of potential collision. Using CAES, it is possible for the training system to recommend a proper action for collision avoidance to trainee. Figure 6 shows an example of the recommended collision avoidance route and risk distribution around the scheduled course line. The risk distribution information helps to explain the reason for the recommended collision avoidance action.
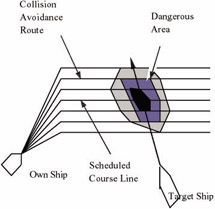
Figure 5: Risk distribution around planned route
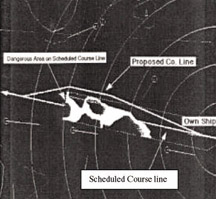
Figure 6: Example of recommended course line
|
| < Day Day Up > |
|
EAN: 2147483647
Pages: 121